發布日期:2022-10-09 點擊率:56
對于高性能的磁場定向控制系統,速度閉環是必不可少的,轉速閉環需要實時的電機轉速,目前速度反饋量的檢測多是采用光電脈沖編碼器、旋轉變壓器或測速發電機。但是,許多場合下不允許安裝任何速度傳感器,此外安裝速度傳感器在一定程度上降低了系統的可靠性。因此,無速度傳感器控制的高性能通用變頻器是當前全世界自動化技術和節能應用中受到普遍關心的產品和開發課題。無速度傳感器磁場定向矢量控制技術的核心是如何準確的獲取磁場定向角以及電機的轉速信息。2000年,日本電氣學會調查了日本各大電氣公司生產的無速度傳感器控制的通用變頻器,把無速度傳感器控制方式分為4類:定子電流轉矩分量誤差補償法;感應電動勢計算法;模型參考自適應(MRAS)法;轉子磁鏈角速度計算法。其中感應電動勢計算法和轉子磁鏈角速度計算法是基于電機數學模型來計算轉速,屬于開環計算轉速,轉速計算的精確度容易受到干擾,而定子電流轉矩分量誤差補償法與MRAS法是基于閉環控制作用構造轉速,可以抑制這種干擾。定子電流轉矩分量誤差補償法結構簡單,已在一些變頻器產品中得到應用,但所產生的動態轉速準確性欠佳。MRAS法則基于轉子磁鏈觀測電壓模型與電流模型構造轉速辨識模型,算法簡單,能實時跟蹤電機轉速變化。在此結合應用SVPWM技術構建了轉子磁場定向無速度傳感器矢量控制系統,采用MRAS法得到轉子轉速辨識模型,對速度進行估算。利用Matlab/Simulink對系統進行仿真,以驗證所設計的控制系統的性能。
1 異步電機轉子磁鏈及轉子轉速的估算
1.1 轉子磁鏈的估算
在轉子磁場定向異步電機元速度傳感器矢量控制系統中,轉子磁鏈難以直接測量。實際采用的是其觀測值,只有當觀測值與實際值相等時,才能達到矢量控制的有效性。因此,準確的獲得轉子磁鏈值是實現矢量控制的關鍵。
按轉子磁場定向異步電機數學模型可推導出磁鏈的計算公式如下(推導過程略),其中磁鏈的估算包括其幅值和角度。
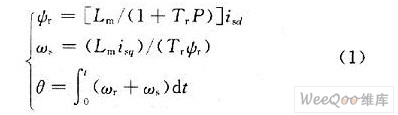
式中:ψr為轉子磁鏈;ωs為轉差角速度;ωr為轉子轉速;isd,isq為定子d,q軸電流;Tr為轉子時間常數,Tr=Lr/Rr,Lm為定轉子互感;Lr為轉子電感;Rr為轉子電阻;θ為磁鏈角度,P=du/dt。
1.2 轉子轉速的估算
采用MRAS方法對轉子轉速進行估計。基本思想是:在異步電機兩相靜止坐標系下,以不含有轉速變量的轉子磁鏈觀測電壓模型為參考模型,含有轉速變量的轉子磁鏈觀測電流模型為可調模型,利用波波夫超穩定性理論設計自適應辨識規律,從而實現對轉子轉速進行估計。異步電機兩相靜止α,β坐標系下轉子磁鏈觀測模型如下兩式所示:

式(2)不含有轉速變量,作為參考模型,式(3)含有轉速變量作為可調模型。在設計模型參考自適應律時,將電流模型轉速變量看成常數作為參考模型,式(3)作為并聯估計模型:從而得到誤差方程:
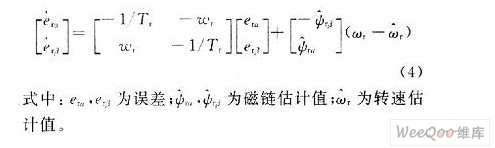
依據波波夫超穩定性理論求解穩態誤差,設計出比例加積分的自適應律為:

式中:ki,kp為可調系數;ω0為給定估算轉速初值,可以任意給定,取ω0=0。至此,構建出基于模型參考自適應方法的轉速辨識模型。
2 仿真模型的建立
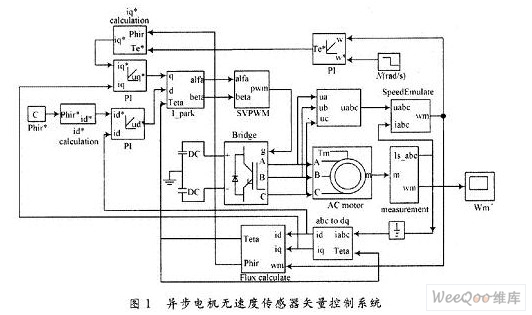
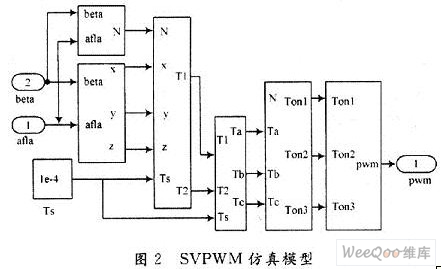
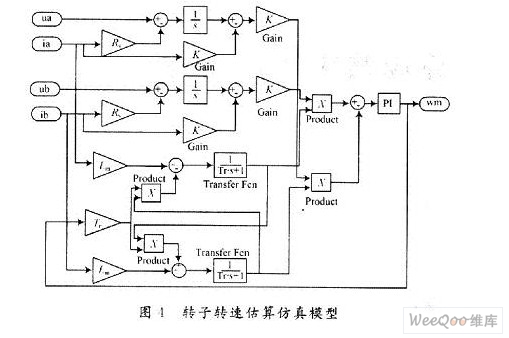
異步電機無速度傳感器矢量控制系統如圖1所示,主要包括三相異步電機模塊,SVPWM模塊,PI模塊,坐標變換模塊,轉子磁鏈估算模塊,轉子轉速估算模塊,逆變器模塊等。該系統主電路采用SVPWM調制逆變器,控制電路中,給定轉速與估算轉速經過速度調節器得到轉矩,與估算磁鏈值計算得到電流isq,經過電流調節器,再經過PARK逆變換得到兩相靜止電壓,經過SVPWM調制,控制逆變器電壓輸出,進而控制三相異步電機。SVPwM控制的基本思想是將電機與逆變器看成一個整體,最終在電機內部形成圓形磁場,以達到更好的控制效果,SVPWM控制的仿真模型如圖2所示。
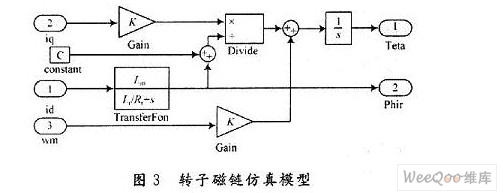
異步電機轉子磁鏈依據式(1)估算,仿真模型如圖3所示。異步電機轉子轉速估算模型如圖4所示,依據轉子磁鏈觀測電壓模型與電流模型,采用MRAS法辨識。在仿真調試過程中,加入一階傳函近似為低通濾波器,對輸出估算轉速進行處理。仿真結果有明顯的改善。
3 仿真結果分析
無速度傳感器矢量控制仿真系統所采用電機的參數為:Pn=2.2 kW,Rs=O.435Ω,Rr=O.816Ω,Lm=0.0693H,L1s=L1r=0.002H,轉動慣量J=O.02kg·m2,極對數Np=1。電機空載運行,初始給定速度為120 rad/s,當t=O.5s時,改變速度為60 rad/s。在啟動時,當t=O.1-2s時,轉子轉速就達到了穩定,當給定速度在t=O.5s時發生變化,轉速輸出在t=O.56s時再次達到穩定,仿真結果如圖5所示。
從仿真結果圖可以看出該系統具有良好的動態性能,能實時跟蹤電機實際速度的變化。
4 結語
基于MRAS方法構建異步電機轉子轉速辨識模型,與SVPWM技術相結合,在Matlab/Sireulink環境下設計出異步電機無速度傳感器矢量控制系統。通過計算機仿真,驗證了該系統能夠實時辨識電機轉速,具有良好的動態性能,對實際工程應用的實現具有一定的理論指導意義。但在電機的實際運行過程中,電機參數會隨著運行環境的變化而發生改變,這時電機轉子磁鏈與速度的估算就會不準確,因而在對實際系統的應用研究中,有必要對轉子電阻進行在線辨識,從而準確估算出轉子磁鏈與轉速。為了提高無速度傳感器控制系統的性能,對電機參數進行實時辨識是今后研究的一個方向。
下一篇: PLC、DCS、FCS三大控
上一篇: 一種基于傳感器網絡中

型號:3042A
價格:面議
庫存:10
訂貨號:3042A
型號:3042H20
價格:面議
庫存:10
訂貨號:3042H20
型號:3070A
價格:面議
庫存:10
訂貨號:3070A
型號:3070A35
價格:面議
庫存:10
訂貨號:3070A35
型號:3090A
價格:面議
庫存:10
訂貨號:3090A
型號:3090A35
價格:面議
庫存:10
訂貨號:3090A35


