發布日期:2022-07-14 點擊率:70
作者:MathWorks的Antonino Riccobono和Arkadiy Turevskiy
電力電子系統依靠反饋控制將電源的電壓和電流轉換成負載所需電壓和電流。例如,DC/DC變換器使用閉環控制系統來實現所需幅值的輸出電壓,并在電源電壓和負載電阻變化時保持該電壓。
電力電子工程師使用經典的控制理論設計控制策略。由于該理論基于線性時不變(LTI)系統,如傳遞函數和狀態空間模型,要將其應用于電力電子系統,工程師需要先找到此類系統的LTI表示。
頻率響應估計(也稱為交流掃頻)是計算電力電子模型的LTI表示的通用方法。頻率響應估計方法將一個幅度和頻率可控的小擾動信號疊加到系統穩態運行的輸入端,然后測量系統對這種擾動的響應。最后,使用測量的輸入和輸出信號來計算頻率響應或傳遞函數,即LTI系統,它可以表示工作點周圍的系統動態特性。
本文介紹了一種用于估算開環Boost變換器的頻率響應的方法。
開環Boost變換器模型
Boost變換器是一種常見的開關變換器,能夠產生大于輸入直流電壓的直流輸出電壓。它常被用于將低電壓源連接到高電壓,供高壓負載使用的場景,應用包括包括消費電子產品、電動汽車、多電船舶和飛機、可再生能源和LED驅動器。
圖1為使用Simscape Electrical 構建的開環Boost電路開關模型。我們假設變換器工作在在連續導通模式(CCM),這意味著當變換器在穩定狀態下工作時,電感電流永遠大于零。將占空比和輸出電壓分別設置為頻率響應估計的輸入擾動點和輸出測量點。傳遞函數以占空比作為控制輸入,以輸出電壓作為輸出。
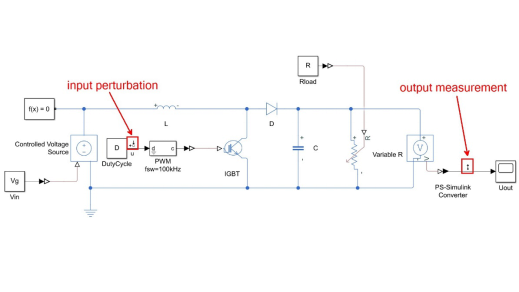
圖1. Boost電路開關模型。
頻率響應估計工作流
頻率響應估計工作流包括以下六個步驟。
1. 指定模型的哪個部分需要頻率響應估計
為此,我們使用Simulink Control Design?的Linearization Manager應用程序中“線性化分析點”指定頻率響應估計所需的輸入和輸出。我們將Input Perturbation分配給占空比,將Output Measurement分配給輸出電壓(圖2)。

圖2. Linearization Manager中的“線性化分析點”工具條。
2. 找到一個工作點并初始化模型
為了獲得準確捕捉系統特性的頻率響應,應在穩態工作點進行估計。仿真結果表明,Boost變換器在大約0.005秒后達到穩態運行(圖3左)。我們可以0.005秒時對模型進行快照,作為穩態工作點(圖3中)。在仿真結束時,將在應用程序工作區中創建一個OperatingPoint對象。我們可以通過點擊“InitializeModel”來初始化這個對象的模型(圖3右)。注:必須確保擾動注入過程中沒有引起工作點變化的擾動。

圖3. 輸出電壓變化(左)、仿真快照(中)和模型初始化(右)。
3. 創建擾動信號
在Model Linearizer應用程序中,我們選擇Sinestream流作為擾動信號。Sinestream為頻率隨時間變化的正弦波構成。首先,我們指定Sinestream覆蓋的頻率范圍(圖4)。
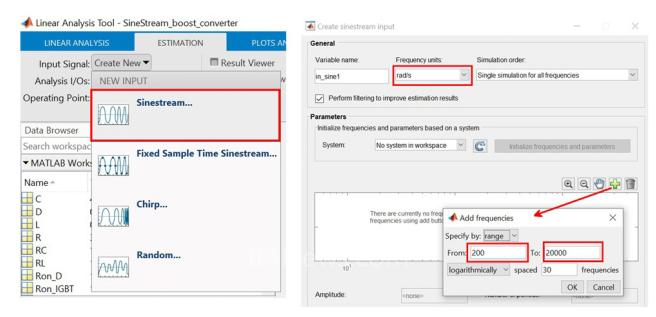
圖4. Frequency Response Estimator應用程序,其中左邊為選擇Sinestream,右邊為設置頻率范圍
然后,為所有頻率或部分頻率指定幅值、周期數、斜坡周期和穩定周期(圖5)。
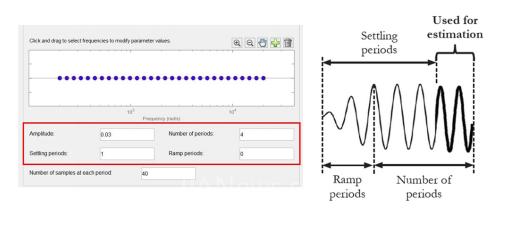
圖5. 正弦信號的參數選擇(左)和相應的實現方式(右)。
4. 計算非參數頻率響應
單擊“Estimation”選項卡中的“Estimate”按鈕開始計算頻率響應。在仿真運行時,Simulink Control Design在指定的輸入端注入Sinestream,并在輸出端測量響應。在仿真結束時,將在應用程序工作區中創建一個frd對象。該對象將系統描述為離散的頻率點,包含對應頻率響應數據,。圖6顯示了時域和頻域結果。
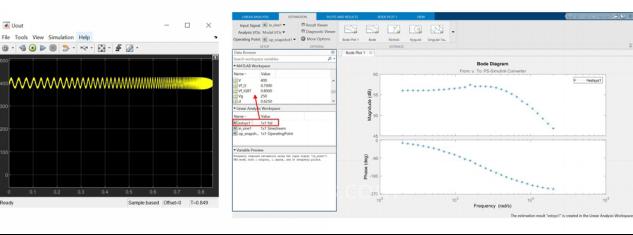
圖6. 時域和頻域的仿真結果。
5. 獲取參數模型
在此步驟中,我們使用System Identification Toolbox?中的tfest命令從數據擬合傳遞函數(提取由idtf對象表示的參數模型)。為此,我們需要將已識別的frd對象從Linear Analysis工作空間復制到MATLAB工作空間(圖6中的紅色箭頭)。然后,在命令行或腳本中使用tfest命令獲得傳遞函數。由于Boost變換器是一個二階系統,因此需要將tfest中的極點數設置為2。如果系統的階數未知,則可以嘗試幾個不同極點數,并選擇提供可接受擬合度的最小值。
6.驗證結果
首先,我們驗證CCM中Boost變換器的參數和非參數估計。圖7顯示這兩個估計模型是高度匹配的。
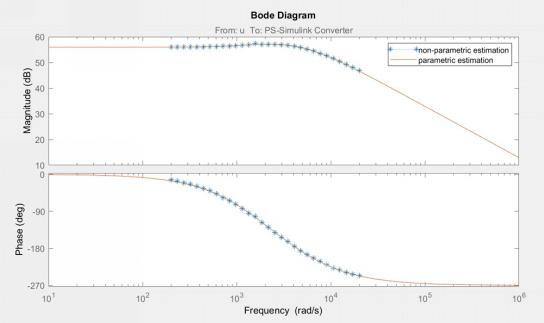
圖7. 非參數和參數估計的波特圖。
接下來,我們使用開關模式Boost變換器和估計的傳遞函數在Simulink?中進行時域驗證。我們測量并比較兩個系統對相同小擾動信號的響應,即在穩態占空比上疊加2%的正階躍。圖8顯示了估計的模型響應與開關模型響應非常匹配,表明估計結果正確。
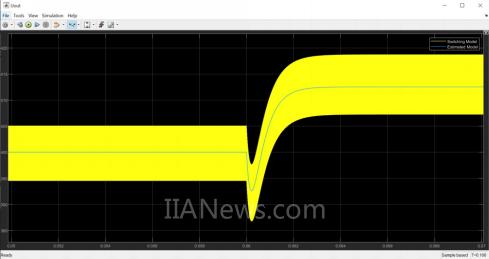
圖8. 時域驗證,顯示了開關模型和估計模型對相同小擾動信號的響應。
現在,我們已經獲得了Boost變換器模型的計算LTI表示形式,可以將其用于控制設計和分析。比如,我們可以將估計的LTI對象導入PID Tuner應用程序來調整控制器參數,以滿足帶寬、相位裕度和其他反饋動態要求。
下一篇: PLC、DCS、FCS三大控
上一篇: 利用ADI的mSure技術實


