PWM控制及SPWM波的生成
1、PWM控制的基本原理
PWM(PulseWidthModulaTIon)控制就是對(duì)脈沖的寬度進(jìn)行調(diào)制的技術(shù)。即通過(guò)對(duì)一系列脈沖的寬度進(jìn)行調(diào)制,來(lái)等效地獲得所需要的波形。PWM控制技術(shù)在逆變電路中的應(yīng)用最為廣泛,對(duì)逆變電路的影響也最為深刻,PWM控制技術(shù)在逆變電路中的應(yīng)用也最具代表性。
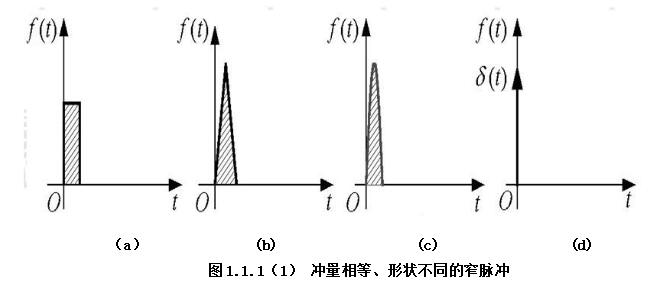
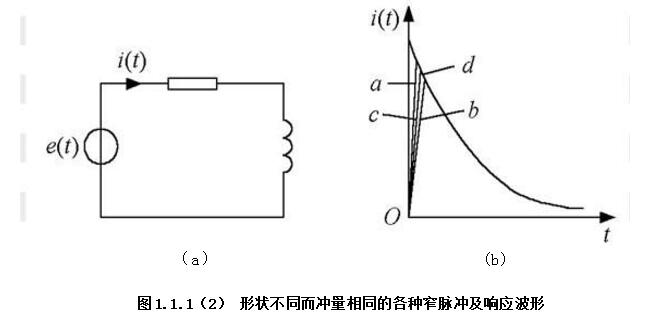
面積等效原理是PWM控制技術(shù)的重要理論基礎(chǔ),即在采樣控制中,沖量相等而形狀不同的窄脈沖加在具有慣性的同一環(huán)節(jié)上時(shí),其效果基本相同。其中,沖量指的是窄脈沖的面積;效果基本相同是指環(huán)節(jié)的輸出響應(yīng)波形基本相同。如圖1.1.1(1)所示,三個(gè)窄脈沖形狀不同,但是它們的面積都等于1,當(dāng)它們分別加在如圖1.1.1(2)(a)所示的R-L電路上時(shí),并設(shè)其電流i(t)為電路的輸出,則其輸出響應(yīng)波形基本相同且如圖1.1.1(2)(b)所示。
2、SPWM法的基本原理
脈沖幅值相等而脈沖寬度按正弦規(guī)律變化而正弦波等效的PWM波稱(chēng)為SPWM(sinusoidalPWM)波形。
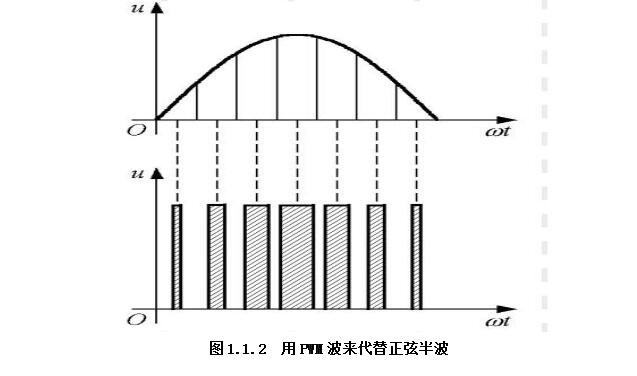
如圖1.1.2所示,把正弦半波分成N等份,就可以把正弦半波看成是由N個(gè)彼此相連的脈沖序列所組成的波形,這些脈沖寬度都等于N/?,但幅值不等,且脈沖頂部不是水平直線,而是按正弦規(guī)律變化的曲線。如果把這些脈沖序列用相同數(shù)量的等幅值而不等寬的矩形脈沖來(lái)代替,使矩形脈沖的中點(diǎn)和相應(yīng)的正弦波部分中點(diǎn)重合,且使矩形脈沖和相應(yīng)的正弦波部分面積相等,則可得圖所示的矩形脈沖序列,這就是SPWM波形。
3、規(guī)則采樣法
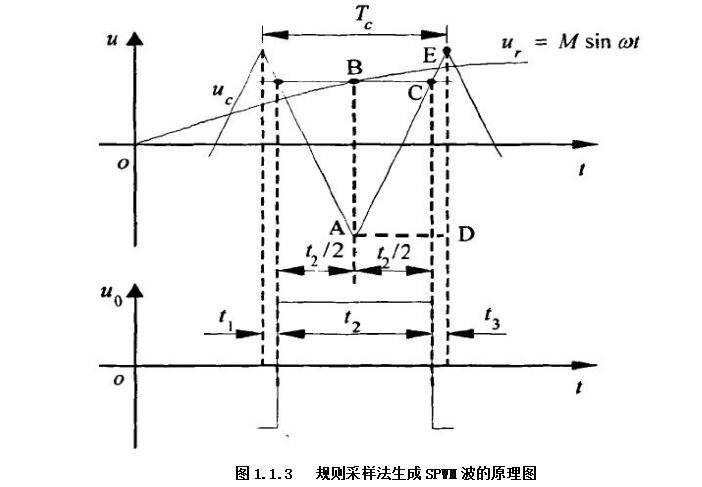
SPWM的控制就是根據(jù)三角載波與正弦調(diào)制波的交點(diǎn)來(lái)確定逆變器功率開(kāi)關(guān)器件的通斷時(shí)刻。規(guī)則采樣法是一種應(yīng)用較廣的工程實(shí)用方法,一般采用三角波作為載波,其原理就是用三角波對(duì)正弦波進(jìn)行采樣得到階梯波,再以階梯波與三角波的交點(diǎn)時(shí)刻控制開(kāi)關(guān)器件的通斷,從而實(shí)現(xiàn)SPWM法。當(dāng)三角波只在其頂點(diǎn)(或底點(diǎn))位置對(duì)正弦波進(jìn)行采樣時(shí),由階梯波與三角波的交點(diǎn)所確定的脈寬,在一個(gè)載波周期(即采樣周期)內(nèi)的位置是對(duì)稱(chēng)的,這種方法稱(chēng)為對(duì)稱(chēng)規(guī)則采樣其原理如圖1.1.3所示。
單極性和雙極性PWM控制逆變電路分析
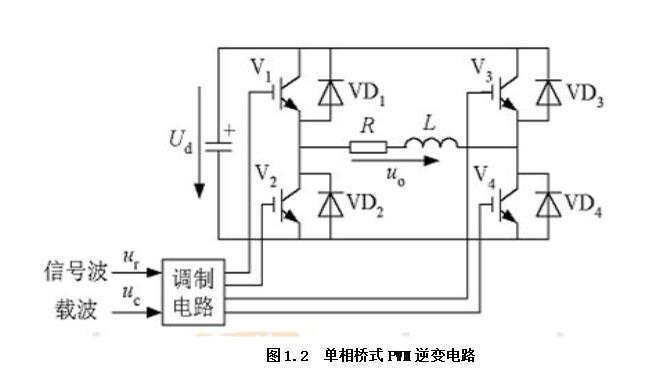
電路如圖1.2所示,該電路工作時(shí),1V和2V通斷互補(bǔ),3V和4V也通斷互補(bǔ),如在ou正半周,1V導(dǎo)通,2V關(guān)斷,3V和4V交替通斷,且負(fù)載電流比電壓滯后,在電壓正半周,電流有一段區(qū)間為正,一段區(qū)間為負(fù)。在ou的負(fù)半周,讓2V保持通態(tài),1V保持?jǐn)鄳B(tài),3V和4V交替通斷,負(fù)載電壓ou可以得到-dU和零兩種電平。
1、單極性PWM控制方式
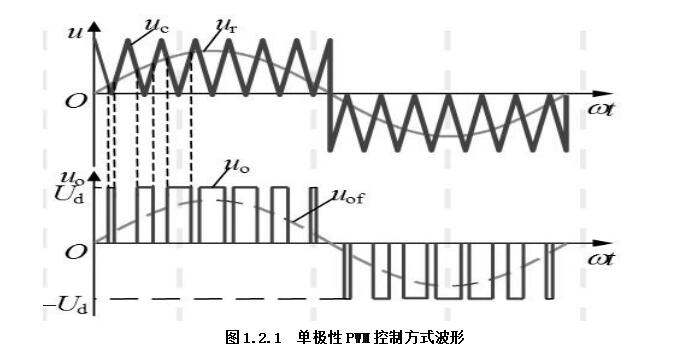
如圖1.2.1所示,調(diào)制信號(hào)ru為正弦波,載波cu在ru的正半周為正極性的三角波,在ru的負(fù)半周為負(fù)極性的三角波。a)在ru的正半周時(shí),1V保持通態(tài),2V保持?jǐn)鄳B(tài),當(dāng)ru》cu時(shí),使4V導(dǎo)、3V關(guān)斷,ou=dU。當(dāng)ru《cu時(shí),使4V關(guān)斷、3V導(dǎo)通,ou=0。b)在ru的負(fù)半周時(shí),1V保持?jǐn)鄳B(tài),2V保持通態(tài)。當(dāng)ru《cu時(shí),使3V導(dǎo)通、4V關(guān)斷,ou=-dU。當(dāng)ru》cu時(shí),使3V關(guān)斷、4V導(dǎo)通,ou=0。
1.1單極性PWM控制方式
如圖1.2.1所示,調(diào)制信號(hào)ru為正弦波,載波cu在ru的正半周為正極性的三角波,在ru的負(fù)半周為負(fù)極性的三角波。a)在ru的正半周時(shí),1V保持通態(tài),2V保持?jǐn)鄳B(tài),當(dāng)ru》cu時(shí),使4V導(dǎo)、3V關(guān)斷,ou=dU。當(dāng)ru《cu時(shí),使4V關(guān)斷、3V導(dǎo)通,ou=0。b)在ru的負(fù)半周時(shí),1V保持?jǐn)鄳B(tài),2V保持通態(tài)。當(dāng)ru《cu時(shí),使3V導(dǎo)通、4V關(guān)斷,ou=-dU。當(dāng)ru》cu時(shí),使3V關(guān)斷、4V導(dǎo)通,ou=0。
1.2雙極性PWM控制方式
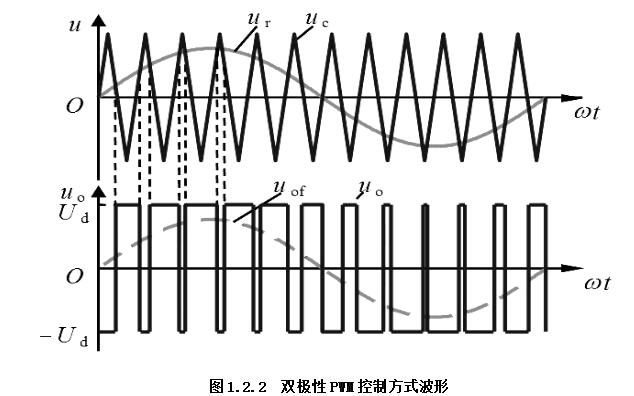
如圖1.2.2所示,在調(diào)制信號(hào)ru和載波信號(hào)cu的交點(diǎn)的時(shí)刻控制各個(gè)開(kāi)關(guān)器件的通斷。
a)在ru的半個(gè)周期內(nèi),三角波載波有正有負(fù),所得的PWM波也有正有負(fù),在ru的一個(gè)周期內(nèi),輸出的PWM波只有±dU兩種電平。b)在ru的正負(fù)半周,對(duì)各個(gè)開(kāi)關(guān)器件的控制規(guī)律相同。當(dāng)ru》cu時(shí),1V和4V導(dǎo)通,2V和3V關(guān)斷,這時(shí)如果oi》0,則1V和4V導(dǎo)通,如果oi《0,則1VD和4VD導(dǎo)通,但不管那種情況都是ou=dU。當(dāng)ru《cu時(shí),2V和3V導(dǎo)通,1V和4V關(guān)斷,這時(shí)如果oi《0,則2V和3導(dǎo)通,如果oi》0,則2VD和3VD導(dǎo)通,但是不管哪種情況都是ou=-dU。
單極性與雙極性PWM模式
1.單極性PWM模式
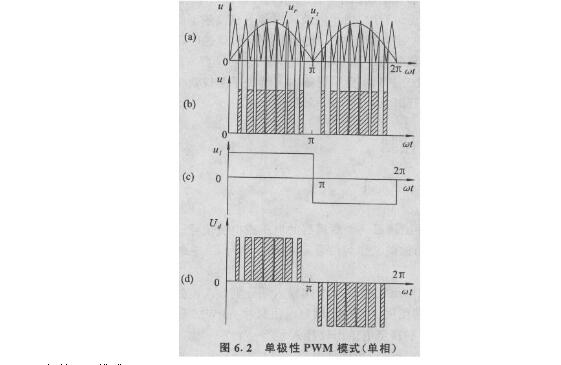
產(chǎn)生單極性PWM模式的基本原理如圖6.2所示。首先由同極性的三角波載波信號(hào)ut。與調(diào)制信號(hào)ur,比較(圖6.2(a)),產(chǎn)生單極性的PWM脈沖 (圖6.2(b));然后將單極性的PWM脈沖信號(hào)與圖6.2(c)所示的倒相信號(hào)UI相乘,從而得到正負(fù)半波對(duì)稱(chēng)的PWM脈沖信號(hào)Ud,如圖 6.2(d)所示。
2.雙極性PWM模式
雙極性PWM控制模式采用的是正負(fù)交變的雙極性三角載波ut與調(diào)制波ur,如圖6.3所示,可通過(guò)ut與ur,的比較直接得到雙極性的PWM脈沖,而不需要倒相電路。
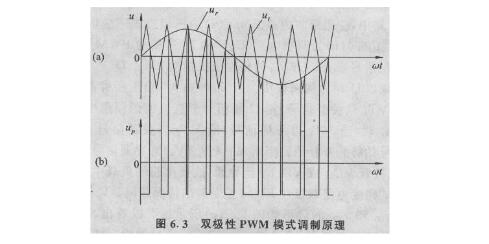
與單極性模式相比,雙極性PWM模式控制電路和主電路比較簡(jiǎn)單,然而對(duì)比圖6.2(d)和圖6.3(b)可看出,單極性PWM模式要比雙極性PWM模式輸出電壓中、高次諧波分量小得多,這是單極性模式的一個(gè)優(yōu)點(diǎn)。
單極性調(diào)制方式的特點(diǎn)是在一個(gè)開(kāi)關(guān)周期內(nèi)兩只功率管以較高的開(kāi)關(guān)頻率互補(bǔ)開(kāi)關(guān),保證可以得到理想的正弦輸出電壓:另兩只功率管以較低的輸出電壓基波頻率工作,從而在很大程度上減小了開(kāi)關(guān)損耗。但又不是固定其中一個(gè)橋臂始終為低頻(輸出基頻),另一個(gè)橋臂始終為高頻[載波頻率),而是每半個(gè)輸出電壓周期切換工作,即同一個(gè)橋臂在前半個(gè)周期工作在低頻,而在后半周則工作在高頻,這樣可以使兩個(gè)橋臂的功率管工作狀態(tài)均衡,對(duì)于選用同樣的功率管時(shí),使其使用壽命均衡,對(duì)增加可靠性有利。
雙極性調(diào)制方式的特點(diǎn)是4個(gè)功率管都工作在較高頻率(載波頻率),雖然能得到正弦輸出電壓波形,但其代價(jià)是產(chǎn)生了較大的開(kāi)關(guān)損耗。
有限雙極性控制ZVZCSPWM全橋變換器
1、ZVZCS PWM全橋電路有限雙極性控制過(guò)程分析
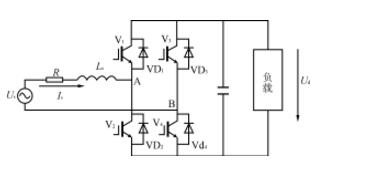
有限雙極性控制ZVZCS PWM全橋電路功率部分如圖1所示。Q1~Q4四個(gè)功率管(內(nèi)帶續(xù)流二極管)組成一個(gè)全橋電路。其中,Q1、Q2組成超前橋臂,兩端分別并聯(lián)有吸收電容C1、C2,用來(lái)實(shí)現(xiàn)Q1、Q2的ZVS。L1為高頻變壓器的漏感。Cb為隔直電容,用來(lái)實(shí)現(xiàn)滯后臂(由Q3、Q4組成)的ZCS。
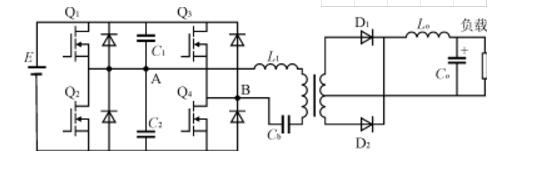
圖1 ZVZCSPWM全橋電路示意圖
在有限雙極性方法控制下,Q1~Q4的驅(qū)動(dòng)時(shí)序見(jiàn)圖2。其中ug1、ug2為脈寬可調(diào)的定頻變寬脈沖;ug3、ug4為互補(bǔ)方波,頻率、脈寬固定。當(dāng)然考慮到直通的問(wèn)題,ug3、ug4不能同時(shí)為1,要錯(cuò)開(kāi)一個(gè)固定的死區(qū)時(shí)間。ug1、ug4的上升沿(表示Q1、Q4開(kāi)始導(dǎo)通)一致,ug2、ug3的上升沿一致。uAB表示加在隔直電容及變壓器兩端的電壓。由于超前橋臂并聯(lián)電容的存在,變壓器端電壓在下降時(shí)不會(huì)突然到零,而是有個(gè)過(guò)渡過(guò)程,其時(shí)間取決于并聯(lián)電容的大小及負(fù)載電流等條件。ip為變壓器繞組電流。ucb為隔直電容Cb上的電壓,其幅值取決于Cb大小及其它條件,Cb越小,ucb幅值越大,ZCS實(shí)現(xiàn)得越好,但同時(shí)開(kāi)關(guān)管電壓應(yīng)力又增大,因此Cb不能太小,一般要讓ucb最大值小于直流輸入電壓的10%。
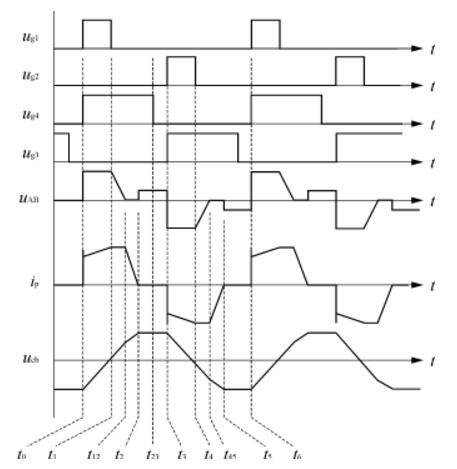
圖2 全橋電路有限雙極性控制時(shí)序及各變量響應(yīng)圖
電路工作過(guò)程分析如下:
1)t0時(shí)刻Q1、Q4同時(shí)導(dǎo)通,變壓器原邊電流ip開(kāi)始上升,流向是從Q1到L1、變壓器、Cb、Q4。功率從原邊流向副邊,同時(shí)隔直電容Cb上的電壓開(kāi)始上升。為了簡(jiǎn)化分析,暫不考慮變壓器的勵(lì)磁電流和副邊電流Io的波動(dòng),因此變壓器原邊電流ip(t)為
ip(t)=Ipo=Io/n(1)
式中:n為變壓器原副邊匝比。
當(dāng)然,實(shí)際電路中由于副邊整流二極管的反向恢復(fù)過(guò)程,ip(t)上升沿有一個(gè)尖峰,見(jiàn)圖2。
Cb兩端電壓ucb(t)為
ucb(t)= -ucbp(2)
-ucbp(2)
式中:ucbp為電容Cb上最大電壓。
2)在t1時(shí)刻Q1關(guān)斷,Q1的關(guān)斷是ZVS關(guān)斷,原邊電流ip通過(guò)C1(充電)、C2(放電)繼續(xù)按原方向流動(dòng)。C2經(jīng)過(guò)一段時(shí)間的放電,在t12時(shí)刻C2上的電壓降到零,Q2上的反并聯(lián)二極管開(kāi)始導(dǎo)通續(xù)流。此階段電容C2兩端電壓uc2(t)變化過(guò)程為
uc2(t)=Ipot/(C1+C2)(3)
并有
t12-t1=E(C1+C2)/Ipo(4)
式中:E為直流輸入電壓。
3)由于Cb上的電壓作用,在t2時(shí)刻環(huán)流衰減到零,原邊電流變化過(guò)程為
ip(t)=Ipo-ucbpt/L1(5)
該狀態(tài)持續(xù)時(shí)間(即環(huán)流時(shí)間)為
t2-t12=IpoL1/ucbp(6)
此時(shí)ucb(t)達(dá)到最大值UCbp。由式(2)可近似得到
t2-t0=2UCbpCb/Ipo(7)
4)在t2~t23時(shí)刻,電容Cb上的能量通過(guò)變壓器漏感對(duì)Q2的輸出電容充電,由于時(shí)間常數(shù)很小,可認(rèn)為該過(guò)程響應(yīng)速度很快,諧振過(guò)程很快結(jié)束。穩(wěn)定時(shí)Q2兩端電壓保持為UCbp。
5)t23時(shí)刻Q4關(guān)斷,顯然,由于此時(shí)Q4上電壓電流均為零,因此Q4是ZVZCS關(guān)斷。經(jīng)一個(gè)固定的死區(qū)時(shí)間后,在t3時(shí)刻,Q2、Q3同時(shí)導(dǎo)通,由于此時(shí)Q2兩端電壓為UCbp,由設(shè)計(jì)可保證UCbp《10%E,且環(huán)流已衰減到零,因此可近似認(rèn)為Q2是ZVZCS導(dǎo)通。而Q3是硬開(kāi)關(guān)導(dǎo)通,而且Q3導(dǎo)通時(shí)其兩端電壓大小約為直流輸入電壓大小。而在普通硬開(kāi)關(guān)工作方式下Q3導(dǎo)通時(shí)其端電壓是直流輸入電壓的一半,因此ZVZCS控制模式下Q3導(dǎo)通時(shí)輸出電容上的能量損耗反而比普通硬開(kāi)關(guān)狀態(tài)下大,這是這種方法最大的缺點(diǎn)。為了減輕該缺點(diǎn)所帶來(lái)的不利因素,Q3、Q4可選輸出電容較小的功率管如IGBT。
6)在t3時(shí)刻之后電路工作過(guò)程和t0~t3時(shí)類(lèi)似,這里就不詳細(xì)分析了。
2、全范圍實(shí)現(xiàn)ZVS和ZCS的約束條件
由式(2)可以看到,在占空比一定時(shí),隔直電容Cb越小,UCbp越大,由式(6)可看到,變壓器漏感越小、ucbp越大,則環(huán)流時(shí)間越短,因而ZCS實(shí)現(xiàn)得越充分。將式(7)代入式(6),并設(shè)t12-t0=DT/2(D為占空比,T為開(kāi)關(guān)周期),則有
t2-t12=4CbL1/DT(8)
可見(jiàn)在電路參數(shù)固定的情況下,環(huán)流時(shí)間是一個(gè)固定值,不依賴(lài)于負(fù)載。實(shí)驗(yàn)也表明,適當(dāng)減小開(kāi)關(guān)頻率,從而使DT變大,可使環(huán)流時(shí)間t2-t12減小,有利于ZCS的實(shí)現(xiàn)。
由式(4)可看到C1、C2越大,超前橋臂由導(dǎo)通轉(zhuǎn)截止后,C2上電壓降到零的過(guò)渡時(shí)間越長(zhǎng),因而ZVS實(shí)現(xiàn)得越好。而且負(fù)載越輕(Ipo越小),過(guò)渡時(shí)間越長(zhǎng)。而移相控制由于超前橋臂上下兩個(gè)開(kāi)關(guān)管的導(dǎo)通基本是互補(bǔ)的,因此在輕載時(shí)很難實(shí)現(xiàn)開(kāi)關(guān)管的ZVS導(dǎo)通。而相比之下,有限雙極性控制方法就顯出它的優(yōu)越性。如當(dāng)Q1關(guān)斷后,Q2導(dǎo)通時(shí)刻由移相控制時(shí)的t12~t3時(shí)刻推后到了t3時(shí)刻,可以充分保證只有當(dāng)Q2的續(xù)流二極管導(dǎo)通后才使Q2導(dǎo)通,從而保證全范圍的ZVS。實(shí)驗(yàn)證明,在正確設(shè)計(jì)好電路參數(shù)后,超前橋臂的ZVS實(shí)現(xiàn)得相當(dāng)好。
3、應(yīng)用實(shí)例
這種有限雙極性控制的ZVZCSPWM全橋變換器,已應(yīng)用到一種3kW(48V/50A)通信電源模塊的設(shè)計(jì)當(dāng)中。具體參數(shù)為:輸入220V/15A;輸出56.4V(最大)/53A(最大);開(kāi)關(guān)工作頻率60kHz;功率管為IRG4PC50W(高速型IGBT);變壓器原副方匝數(shù)比為24/4;輸出濾波電感40μH;輸出濾波電容5000μF。由于沒(méi)有專(zhuān)用的芯片,因此采用UC3825+CD4042合成所需要的邏輯。原理圖如圖3所示。
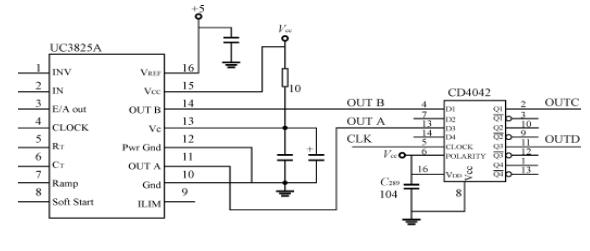
圖3 有限雙極性控制邏輯生成電路實(shí)例
UC3825A是一種峰值電流型控制芯片,在控制環(huán)路中加入電流環(huán)后,電源具有響應(yīng)速度快,保護(hù)迅速,源效應(yīng)和負(fù)載效應(yīng)好等優(yōu)點(diǎn)。模塊整機(jī)功率因數(shù)為0.99,效率90%,重約10kg。該產(chǎn)品已成功運(yùn)行于某移動(dòng)通信基站現(xiàn)場(chǎng)。
什么是整流電路
“整流電路”(recTIfying circuit)是把交流電能轉(zhuǎn)換為直流電能的電路。大多數(shù)整流電路由變壓器、整流主電路和濾波器等組成。它在直流電動(dòng)機(jī)的調(diào)速、發(fā)電機(jī)的勵(lì)磁調(diào)節(jié)、電解、電鍍等領(lǐng)域得到廣泛應(yīng)用。整流電路通常由主電路、濾波器和變壓器組成。20世紀(jì)70年代以后,主電路多用硅整流二極管和晶閘管組成。濾波器接在主電路與負(fù)載之間,用于濾除脈動(dòng)直流電壓中的交流成分。變壓器設(shè)置與否視具體情況而定。變壓器的作用是實(shí)現(xiàn)交流輸入電壓與直流輸出電壓間的匹配以及交流電網(wǎng)與整流電路之間的電隔離。
整流電路的作用是將交流降壓電路輸出的電壓較低的交流電轉(zhuǎn)換成單向脈動(dòng)性直流電,這就是交流電的整流過(guò)程,整流電路主要由整流二極管組成。經(jīng)過(guò)整流電路之后的電壓已經(jīng)不是交流電壓,而是一種含有直流電壓和交流電壓的混合電壓。習(xí)慣上稱(chēng)單向脈動(dòng)性直流電壓。
整流電路作用原理
1.半波整流電路
半波整流電路是一種最簡(jiǎn)單的整流電路。它由電源變壓器B 、整流二極管D 和負(fù)載電阻Rfz ,組成。變壓器把市電電壓(多為220伏)變換為所需要的交變電壓e2,D 再把交流電變換為脈動(dòng)直流電。 變壓器砍級(jí)電壓e2,是一個(gè)方向和大小都隨時(shí)間變化的正弦波電壓,它的波形如圖5-2(a)所示。在0~K時(shí)間內(nèi),e2為正半周即變壓器上端為正下端為負(fù)。此時(shí)二極管承受正向電壓面導(dǎo)通,e2通過(guò)它加在負(fù)載電阻Rfz上,在π~2π 時(shí)間內(nèi),e2為負(fù)半周,變壓器次級(jí)下端為正;上端為負(fù)。這時(shí)D承受反向電壓,不導(dǎo)通,Rfz,上無(wú)電壓。在2π~3π時(shí)間內(nèi),重復(fù)0~π 時(shí)間的過(guò)程,而在3π~4π時(shí)間內(nèi),又重復(fù)π~2π時(shí)間的過(guò)程…這樣反復(fù)下去,交流電的負(fù)半周就被“削”掉了,只有正半周通過(guò)Rfz,在Rfz上獲得了一個(gè)單一右向(上正下負(fù))的電壓,如圖5-2(b)所示,達(dá)到了整流的目的,但是,負(fù)載電壓Usc。以及負(fù)載電流的大小還隨時(shí)間而變化,因此,通常稱(chēng)它為脈動(dòng)直流。
這種除去半周、圖下半周的整流方法,叫半波整流。不難看出,半波整流是以“犧牲”一半交流為代價(jià)而換取整流效果的,電流利用率很低(計(jì)算表明,整流得出的半波電壓在整個(gè)周期內(nèi)的平均值,即負(fù)載上的直流電壓Usc =0.45e2,此處注意e2是變壓器二次端口的有效值,而不是最大值。如變壓器得到e2=  ,e2取值為20 )因此常用在高電壓、小電流的場(chǎng)合,而在一般無(wú)線電裝置中很少采用。
,e2取值為20 )因此常用在高電壓、小電流的場(chǎng)合,而在一般無(wú)線電裝置中很少采用。
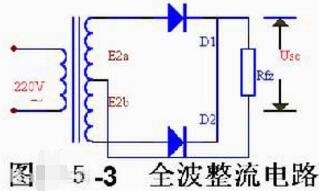
2.全波整流電路
如果把整流電路的結(jié)構(gòu)作一些調(diào)整,可以得到一種能充分利用電能的全波整流電路。圖5-3 是全波整流電路的電原理圖。
全波整流電路,可以看作是由兩個(gè)半波整流電路組合成的。變壓器次級(jí)線圈中間需要引出一個(gè)抽頭,把次組線圈分成兩個(gè)對(duì)稱(chēng)的繞組,從而引出大小相等但極性相反的兩個(gè)電壓e2a 、e2b ,構(gòu)成e2a 、D1、Rfz與e2b 、D2、Rfz ,兩個(gè)通電回路。
全波整流電路的工作原理,可用圖5-4 所示的波形圖說(shuō)明。在0~π間內(nèi),e2a 對(duì)Dl為正向電壓,D1 導(dǎo)通,在Rfz 上得到上正下負(fù)的電壓;e2b 對(duì)D2為反向電壓,D2 不導(dǎo)通。在π-2π時(shí)間內(nèi),e2b 對(duì)D2為正向電壓,D2導(dǎo)通,在Rfz 上得到的仍然是上正下負(fù)的電壓;e2a 對(duì)D1為反向電壓,D1 不導(dǎo)通。
帶平衡電抗器的雙反星型可控整流電路帶平衡電抗器的雙反星形可控整流電路是將整流變壓器的兩組二次繞組都接成星形,但兩組接到晶閘管的同名端相反;兩組二次繞組的中性點(diǎn)通過(guò)平衡電控器LB連接在一起。
3.橋式整流電路
橋式整流電路是使用最多的一種整流電路。這種電路,只要增加兩只二極管口連接成“橋”式結(jié)構(gòu),便具有全波整流電路的優(yōu)點(diǎn),而同時(shí)在一定程度上克服了它的缺點(diǎn)。
整流電路橋式整流電路的工作原理如下:e2為正半周時(shí),對(duì)D1、D3和方向電壓,Dl,D3導(dǎo)通;對(duì)D2、D4加反向電壓,D2、D4截止。電路中構(gòu)成e2、Dl、Rfz 、D3通電回路,在Rfz ,上形成上正下負(fù)的半波整流電壓,e2為負(fù)半周時(shí),對(duì)D2、D4加正向電壓,D2、D4導(dǎo)通;對(duì)D1、D3加反向電壓,D1、D3截止。電路中構(gòu)成e2、D2Rfz 、D4通電回路,同樣在Rfz 上形成上正下負(fù)的另外半波的整流電壓。
如此重復(fù)下去,結(jié)果在Rfz ,上便得到全波整流電壓。其波形圖和全波整流波形圖是一樣的。從圖5-6中還不難看出,橋式電路中每只二極管承受的反向電壓等于變壓器次級(jí)電壓的最大值,比全波整流電路小一半。
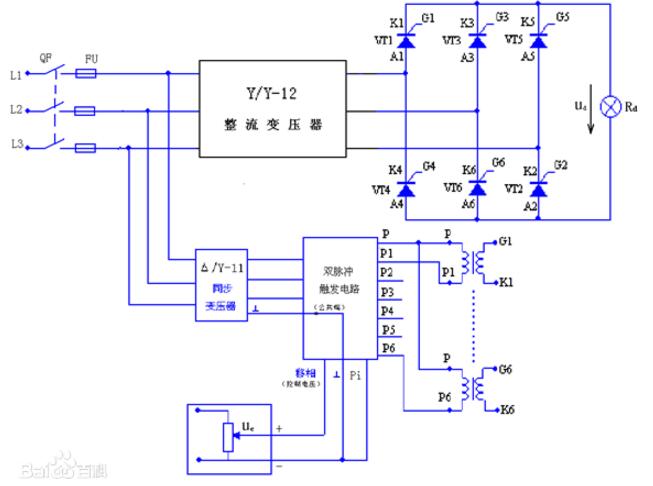
三相橋式全控電路TR為三相整流變壓器,其接線組別采用Y/Y-12。VT1~VT6為晶閘管元件,F(xiàn)U1~FU6為快速熔斷器。TS為三相同步變壓器,其接線組別采用△/Y-11。P端為集成化六脈沖觸發(fā)電路+24V電源輸出端,接脈沖變壓器一次繞組連接公共端。P1~P6端為集成化六脈沖觸發(fā)電路功放管V1~V6集電極輸出端,分別接脈沖變壓器一次繞組的另一端。UC端為移相控制電壓輸入端。
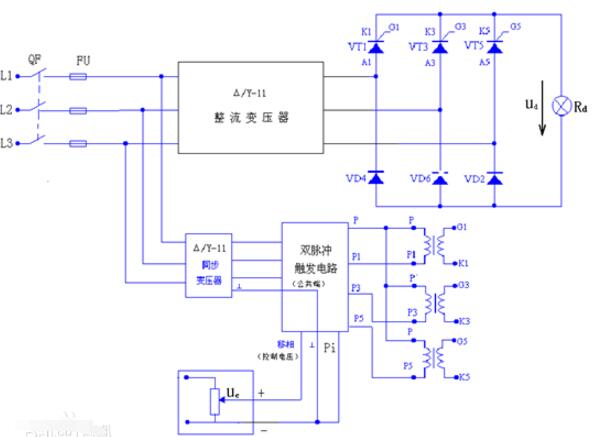
三相橋式半控電路三相橋式半控整流電路與三相橋式全控整流電路基本相同,僅將共陽(yáng)極組VT4,VT6,VT2的晶閘管元件換成了VD4,VD6,VD2整流二極管,以構(gòu)成三相橋式半控整流電路。
整流電路的分類(lèi)
1.單相整流電路
圖1a為單相半波可控整流電路。圖中ug為晶閘管的觸發(fā)脈沖,其工作過(guò)程如下:當(dāng)u2負(fù)半周時(shí),晶閘管不導(dǎo)通。在u2正半周時(shí),不加觸發(fā)脈沖之前,晶閘管也不導(dǎo)通,只有加觸發(fā)脈沖之后,晶閘管才導(dǎo)通,這時(shí)負(fù)載Rd上流過(guò)電流。在電流為零時(shí)刻,晶閘管自動(dòng)關(guān)斷,為下一次觸發(fā)導(dǎo)通作好準(zhǔn)備,如此循環(huán)往復(fù),負(fù)載上得到脈動(dòng)的直流電壓ud。晶閘管從開(kāi)始承受正向電壓起到開(kāi)始導(dǎo)通這一角度稱(chēng)為控制
2.相控電路圖
角,以α表示。這樣,只要改變控制角α的大小,即改變觸發(fā)脈沖出現(xiàn)的時(shí)刻,就改變了直流輸出電壓的平均值。觸發(fā)脈沖總是在電源周期的同一特定時(shí)刻加到晶閘管的控制極上,所以,觸發(fā)脈沖和電源電壓在頻率和相位上要配合好,這種協(xié)調(diào)配合的關(guān)系稱(chēng)為同步。圖1b為單相橋式可控整流電路。它與單相半波可控整流電路相比,其變壓器利用系數(shù)較高,直流側(cè)脈動(dòng)的基波頻率為交流基波的二倍,故為小功率場(chǎng)合常用的整流電路之一。 這里,脈波數(shù)P的概念很重要。所謂脈波數(shù)就是在交流電源的一個(gè)周期之內(nèi)直流側(cè)輸出波形的重復(fù)次數(shù)。通常脈波數(shù)越多,直流側(cè)輸出越平滑,交流側(cè)電流越接近正弦波。為了增加脈波數(shù),可以增加交流側(cè)相數(shù),但是, 一般相數(shù)增加越多,各相的通電時(shí)間變得越短,這樣會(huì)使整流元件與整流變壓器副邊繞組的利用率變壞,使裝置體積變大,成本提高。圖1c為單相橋式半控整流電路,由于可控的晶閘管與不控的二極管混合組成,故稱(chēng)半控。F稱(chēng)續(xù)流二極管,若直流電壓變?yōu)樨?fù)值,它成為直流側(cè)環(huán)流的路徑,維持輸出電壓為零。
單相整流電路比較簡(jiǎn)單,對(duì)觸發(fā)電路的要求較低,相位同步問(wèn)題很簡(jiǎn)單,調(diào)整也比較容易。但它的輸出直流電壓的紋波系數(shù)較大。由于它接在電網(wǎng)的一相上,易造成電網(wǎng)負(fù)載不平衡,所以一般只用于4kW以下的中小容量的設(shè)備上。如果負(fù)載較大,一般都用三相電路。
3.三相整流電路
當(dāng)整流容量較大,要求直流電壓脈動(dòng)較小,對(duì)快速性有特殊要求的場(chǎng)合,應(yīng)考慮采用三相可控整流電路。這是因?yàn)槿嗾餮b置三相是平衡的,輸出的直流電壓和電流脈動(dòng)小,對(duì)電網(wǎng)影響小,且控制滯后時(shí)間短。圖2為三相橋式全控整流電路及其輸出電壓波形。在理想情況下,電路在任何時(shí)刻都必須有兩個(gè)晶閘管導(dǎo)通,一個(gè)是共陽(yáng)極組的,另一個(gè)是共陰級(jí)組的,只有它們同時(shí)導(dǎo)通才能形成導(dǎo)電回路。T1、T2、T3、T4、T5、T6的觸發(fā)脈沖互差60°。因此,電路每隔60°有一個(gè)晶閘管換流,導(dǎo)通次序?yàn)?→2→3→4→5→6,每個(gè)晶閘管導(dǎo)通120°。在整流電路合閘后,共陰極和共陽(yáng)級(jí)組各有一個(gè)晶閘管導(dǎo)通。因此,每個(gè)觸發(fā)脈沖的寬度應(yīng)大于60°、小于120°,或用兩個(gè)窄脈沖等效地代替大于60°的寬脈沖,即在向某一個(gè)晶閘管送出觸發(fā)脈沖的同時(shí),向前一個(gè)元件補(bǔ)送一個(gè)脈沖,稱(chēng)雙脈沖觸發(fā)。整流輸出電壓波形如圖2 所示。當(dāng)T1、T6導(dǎo)通時(shí),ud=uab;T1、T2導(dǎo)通時(shí),ud=uac;同理,依次為ubc,uba,uca,ucb,均為線電壓的一部分,脈動(dòng)頻率為300Hz,晶閘管T1上的電壓uT1波形分為三段,在T1導(dǎo)電的120°中,uT1=0(僅管壓降);當(dāng)T3導(dǎo)通,T1受反向電壓關(guān)斷,uT1=uab;T5導(dǎo)通時(shí),T3關(guān)斷,uT1=uac。因此晶閘承受的最大正、反向電壓為線電壓的峰值。
采用三相全控橋式整流電路時(shí),輸出電壓交變分量的最低頻率是電網(wǎng)頻率的6倍,交流分量與直流分量之比也較小,因此濾波器的電感量比同容量的單相或三相半波電路小得多。另外,晶閘管的額定電壓值也較低。因此,這種電路適用于大功率變流裝置。
4.多相整流電路
隨著整流電路的功率進(jìn)一步增大(如軋鋼電動(dòng)機(jī),功率達(dá)數(shù)兆瓦),為了減輕對(duì)電網(wǎng)的干擾,特別是減輕整流電路高次諧波對(duì)電網(wǎng)的影響,可采用十二相、十八相、二十四相,乃至三十六相的多相整流電
5.多相整流電路
路。圖3a為兩組三相橋串聯(lián)組成的十二相整流電路。為了獲得十二相波形,每個(gè)波頭應(yīng)該錯(cuò)開(kāi)30°。所以采用三繞組變壓器,次級(jí)的兩個(gè)繞組一個(gè)接成星形,另一個(gè)接成三角形,分別供給兩組三相橋。兩組整流橋串聯(lián)后再接到負(fù)載。由于兩組整流橋輸出的電壓的相位彼此差30°,因此在負(fù)載上得到十二脈波的整流電壓,合成電壓中最低次諧波頻率為600Hz,輸出電壓ud=ud1+ud2,電流id=id1=id2。圖3b是兩組三相橋并聯(lián)組成大電流的十二相整流電路。兩橋變壓器次級(jí)繞組電壓依次相差30°。若兩組橋的交流線電壓相等,各自的控制角也相等,則兩組橋的整流平均電壓也相等,只要極性相符合,就可以并聯(lián)運(yùn)行。但是兩組整流電壓的瞬時(shí)值是不等的,兩組電源間會(huì)出現(xiàn)交流環(huán)流。為了限止環(huán)流,延長(zhǎng)晶閘管的導(dǎo)通時(shí)間,需要加入平衡電抗器,輸出電壓ud=(ud1+ud2)/2,電流id=id1+id2。
采用多相整流電路能改善功率因數(shù),提高脈動(dòng)頻率,使變壓器初級(jí)電流的波形更接近正弦波,從而顯著減少諧波的影響。理論上,隨著相數(shù)的增加,可進(jìn)一步削弱諧波的影響。但這樣做增加了設(shè)備費(fèi)用,在技術(shù)上對(duì)精確地得到相同的控制角提出了較嚴(yán)格的要求。因而需對(duì)方案的技術(shù)經(jīng)濟(jì)指標(biāo)進(jìn)行全面分析,最后作出選擇。
6.選擇整流電路
選擇整流電路時(shí),主要從電性能好、結(jié)構(gòu)簡(jiǎn)單、經(jīng)濟(jì)實(shí)用、對(duì)電網(wǎng)影響小等方面考慮,合理選用
pwm整流電路簡(jiǎn)介
PWM整流電路是采用PWM控制方式和全控型器件組成的整流電路,它能在不同程度上解決傳 統(tǒng)整流電路存在的問(wèn)題。把逆變電路中的SPWM控制技術(shù)用于整流電路,就形成了PWM整流電路。通過(guò)對(duì)PWM整流電路進(jìn)行控制,使其輸入電流非常接近正弦波,且和輸入電壓同相位,則功率因數(shù)近似為1。因此,PWM整流電路也稱(chēng)單位功率因數(shù)變流器。
單相全橋PWM整流電路
圖單相全橋PWM整流電路
圖給出了單相PWM整流電路的原理框圖。在UPS中,圖中的負(fù)載即為逆變器和蓄電池。同SPWM逆變電路控制輸出電壓相類(lèi)似,可在PWM整流電路的交流輸入端AB之間產(chǎn)生一個(gè)正弦波調(diào)制PWM波uAB,uAB中除了含有與電源同頻率的基波分量外,還含有與開(kāi)關(guān)頻率有關(guān)的高次諧波。由于電感Ls的濾波作用,這些高次諧波電壓只會(huì)使交流電流is產(chǎn)生很小的脈動(dòng)。如果忽略這種脈動(dòng),is為頻率與電源頻率相同的正弦波。在交流電源電壓us一定時(shí),is的幅值和相位由uAB中基波分量的幅值及其與us的相位差決定。改變uAB中基波分量的幅值和相位,就可以使is與us同相位。
單相全橋PWM整流電路的工作原理
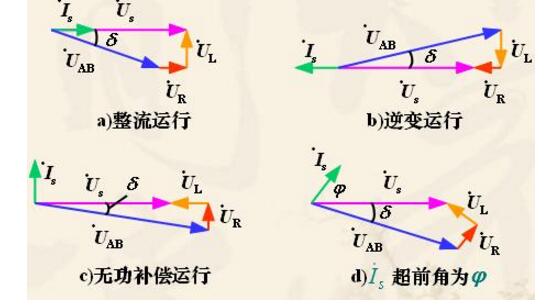
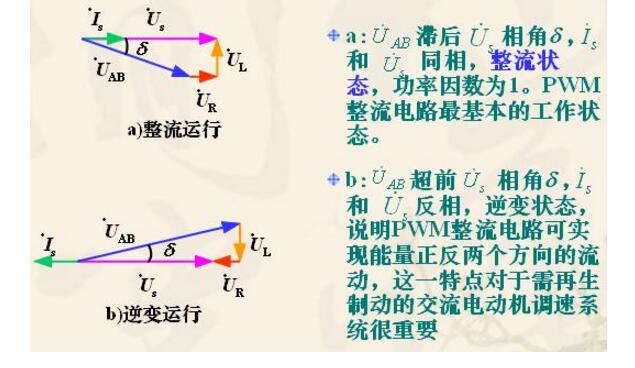
圖6-29PWM整流電路的運(yùn)行方式向量圖
對(duì)單相全橋PWM整流電路工作原理的進(jìn)一步說(shuō)明
整流狀態(tài)下:
us》0時(shí),(V2、VD4、VD1、Ls)和(V3、VD1、VD4、Ls)分別組成兩個(gè)升壓斬波電路,以(V2、VD4、VD1、Ls)為例。
V2通時(shí),us通過(guò)V2、VD4向Ls儲(chǔ)能。
V2關(guān)斷時(shí),Ls中的儲(chǔ)能通過(guò)VD1、VD4向C充電。
us《0時(shí),(V1、VD3、VD2、Ls)和(V4、VD2、VD3、Ls)分別組成兩個(gè)升壓斬波電路。


