本文介紹了SYSMAC NJ系列新一代PLC在16軸直線灌裝機(jī)上的應(yīng)用���,通過現(xiàn)場調(diào)試及試生產(chǎn)���,系統(tǒng)滿足了客戶的要求���,運(yùn)行效果良好���。
1引言
直 線飲料灌裝機(jī)主要用于灌裝各種各樣的瓶裝飲料��,適合于大中型飲料生產(chǎn)廠家����。直線飲料灌裝機(jī)主要包括進(jìn)瓶��、抓瓶����、灌裝���、擰蓋���、抓瓶、出瓶等幾個(gè)步驟����,在進(jìn)瓶 階段����,通過帶有10個(gè)固定夾的皮帶一次帶入10個(gè)瓶�,在第一個(gè)抓瓶階段,10個(gè)抓手同時(shí)把10個(gè)瓶抓入輸送鏈,在灌裝階段,2組10根罐裝管分2次向 10個(gè)瓶中罐液體�����,在擰蓋階段����,一個(gè)伺服帶動(dòng)10個(gè)擰蓋機(jī)構(gòu)進(jìn)行擰蓋����,在第二個(gè)抓瓶階段,把裝滿的10個(gè)瓶從輸送鏈中抓出�����,送上輸出皮帶����,在出瓶階段��,輸 出皮帶送出已罐瓶���,直線飲料灌裝機(jī)的系統(tǒng)框圖如圖1所示。
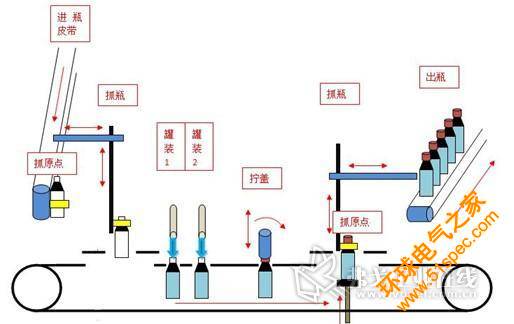
圖1 直線飲料灌裝機(jī)的系統(tǒng)框圖
客 戶原先用傳統(tǒng)的PLC開發(fā)過直線灌裝機(jī)��,各軸伺服通過運(yùn)動(dòng)控制模塊進(jìn)行控制����。各軸的動(dòng)作時(shí)序采用位置判斷�,然后分別以一定的速度和位置啟動(dòng)各個(gè)軸的方式來 完成�。在過去3年中賣出過5、6套設(shè)備���,運(yùn)行效果不好��,發(fā)生異常停機(jī)的頻率很高�,而且沒有暫停功能,每次停機(jī)都要全部重新尋原點(diǎn)��,生產(chǎn)效率比較低�����。采用歐 姆龍SYSMAC NJ系列新一代PLC進(jìn)行改造之后�,用電子凸輪功能來替代以往的普通運(yùn)動(dòng)指令�,故障率低�����,并且很容易完成“暫?��!惫δ?���。
2系統(tǒng)工作原理及控制需求
飲 料灌裝機(jī)主要包括三大部分:恒壓儲(chǔ)液罐�����、夾瓶及灌裝頭部分、變頻調(diào)速傳送帶部分,系統(tǒng)控制功能結(jié)構(gòu)如圖2所示。主機(jī)的上部是恒壓儲(chǔ)液罐,里面有上限位和下 限位液位傳感器,液面低于下限位時(shí)恒壓儲(chǔ)液罐為空,飲料通過進(jìn)液電磁閥流入恒壓儲(chǔ)液罐�,液面達(dá)到上限位時(shí)進(jìn)液電磁閥斷電關(guān)閉,使液位保持穩(wěn)定。
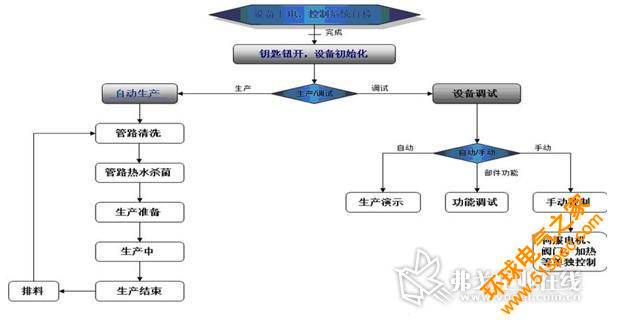
圖2 系統(tǒng)控制功能結(jié)構(gòu)圖
恒 壓儲(chǔ)液罐下面是夾瓶及裝瓶頭部分��,共有20個(gè)灌裝頭�。夾瓶裝置由氣壓缸驅(qū)動(dòng)下降����,下降到位后,夾瓶裝置由另一組氣缸夾緊定位,下降及夾緊由行程開關(guān)控制位 置。夾緊定位后,灌裝頭由第三組氣缸驅(qū)動(dòng)下降����,到位后灌裝頭電磁閥打開����,開始灌液�����,延時(shí)后電磁閥關(guān)閉���,通過控制電磁閥的開啟時(shí)間達(dá)到灌裝容量控制����。放瓶動(dòng) 作流程如圖3所示。
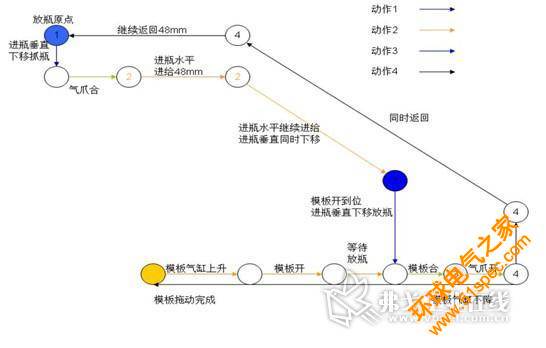
圖3 放瓶動(dòng)作流程
傳 送帶電動(dòng)機(jī)由變頻器控制,實(shí)現(xiàn)無級變速,達(dá)到系統(tǒng)經(jīng)濟(jì)運(yùn)行的目的。電機(jī)啟動(dòng)1s后�����,進(jìn)瓶氣缸縮回、開始進(jìn)瓶�,3s后出瓶處氣缸伸出擋住空料瓶��。進(jìn)瓶處設(shè)置 光電開關(guān)檢測進(jìn)瓶個(gè)數(shù),當(dāng)達(dá)到相應(yīng)數(shù)量后傳送帶電動(dòng)機(jī)停止���。灌裝頭下降到瓶口,由通過觸摸屏輸入的時(shí)間���,使PLC控制灌裝頭的開啟時(shí)間。灌裝結(jié)束后����,灌裝 頭上升���,夾瓶裝置放松�、上升�。出瓶處氣缸縮回,傳送電動(dòng)機(jī)又開始轉(zhuǎn)動(dòng)����,1s后進(jìn)瓶處氣缸縮回��,光電開關(guān)又開始檢測進(jìn)瓶個(gè)數(shù)����。出瓶動(dòng)作流程如圖4所示�。
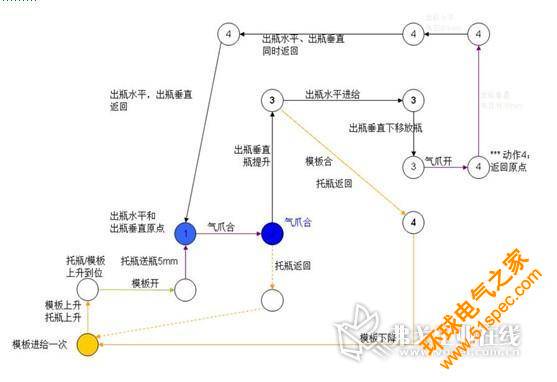
圖4 出瓶動(dòng)作流程
在本項(xiàng)目中��,需要研究的重點(diǎn)課題有以下幾點(diǎn):(1)電子凸輪代替時(shí)序控制;(2)暫停功能;(3)工位判斷;(4)回零停止;(5)急停保護(hù);(6)曲柄的線性處理;(7)凸輪表的變換��。其中��,暫停功能和曲柄的線性處理是客戶以往舊設(shè)備未能實(shí)現(xiàn)的功能���。
3系統(tǒng)解決方案
3.1方案配置(見表1)
表1 系統(tǒng)方案配置表

3.2系統(tǒng)功能實(shí)現(xiàn)
(1)電子凸輪代替時(shí)序控制
以“進(jìn)瓶水平”(MC_BottleInHorizontal)為例�,主軸為虛軸����,從軸為實(shí)軸�。時(shí)序圖如圖5所示��。
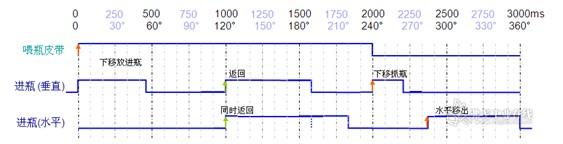
圖5 時(shí)序控制圖
主 軸以360為一個(gè)周期,進(jìn)行循環(huán)速度控制。主軸�、從軸都在零位��。從軸開始的時(shí)候并不啟動(dòng)����,而是在主軸位置到達(dá)285時(shí)開始啟動(dòng),當(dāng)主軸位置到達(dá)360 時(shí),從軸停止����。在下一個(gè)周期���,主軸到達(dá)120的時(shí)候,從軸開始返回(反轉(zhuǎn))��,主軸位置到達(dá)220的時(shí)候����,從軸停止(回零位)。進(jìn)瓶水平軸與主軸構(gòu)成的電子 凸輪表如圖6所示�����。

圖6 進(jìn)瓶水平軸與主軸構(gòu)成的電子凸輪表
從圖6可以看到���,主軸為0的時(shí)候����,從軸也是0,而根據(jù)時(shí)序圖的要求��,從軸的“0”應(yīng)該在主軸的“285”�。顯然這樣的動(dòng)作是不正確的。這樣編制凸輪表的原因在于����,NJ的電子凸輪表的起始點(diǎn)必須為兩個(gè)“0”�����,即主軸�����、從軸都從0開始,如圖7所示����。
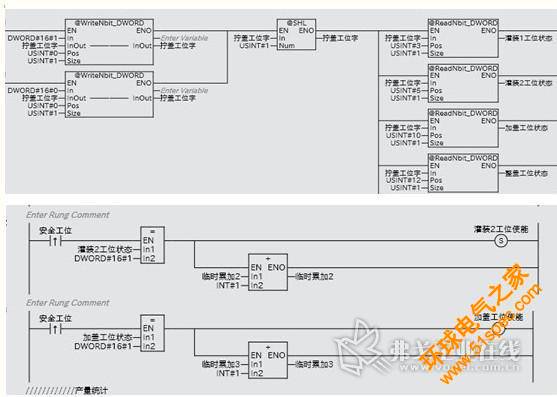
圖7 NJ電子凸輪表
解決這個(gè)問題的辦法是對編制好的凸輪表進(jìn)行“偏移”,偏移的程序如圖8所示����。
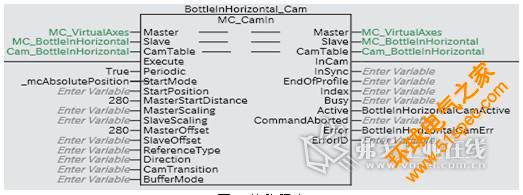
圖8 偏移程序
通 過MasterOffset將主軸向后偏移280���,這時(shí)的動(dòng)作時(shí)序和凸輪形狀就與工藝要求相符了�,但要注意的是���,這時(shí)的從軸起始位置不為0�,會(huì)造成起始速 度“無窮大”,從而引發(fā)伺服報(bào)警����。將MasterScaling設(shè)置為280����,就可以將從軸的起始點(diǎn)推遲到“主軸280”的位置,當(dāng)主軸啟動(dòng)時(shí)�,從軸并不 啟動(dòng)�,而是等到主軸到達(dá)280位置時(shí)再啟動(dòng)���,這樣就可以實(shí)現(xiàn)客戶的工藝要求了�。
(2)暫停功能
這套系統(tǒng)相比以前用CS、CJ來做的系統(tǒng)而言�����,一個(gè)很重要的亮點(diǎn)就是可以很容易的實(shí)現(xiàn)“暫停功能”,具體程序如圖9所示��。
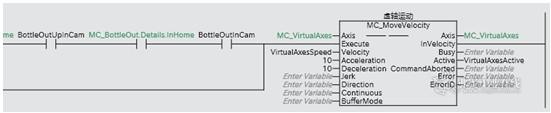
圖9 暫停功能程序1
虛軸的啟動(dòng)采用速度控制指令��,以360為周期循環(huán)運(yùn)動(dòng)����,見圖10����。
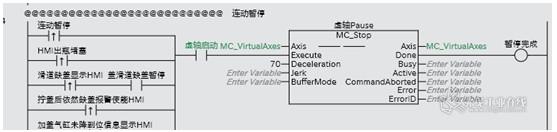
圖10 暫停功能程序2
當(dāng) 需要暫停設(shè)備時(shí)�,只需執(zhí)行MC_Stop指令即可。當(dāng)再次啟動(dòng)時(shí),只需再次執(zhí)行MC_Velocity指令�����,設(shè)備會(huì)從當(dāng)前停止的位置繼續(xù)運(yùn)行����。暫停的好處 是�����,當(dāng)操作人員需要暫時(shí)停止設(shè)備,做簡單處理,后面又需要快速恢復(fù)生產(chǎn)狀態(tài)時(shí)�����,不需要重新尋原點(diǎn)。對生產(chǎn)效率的提高幫助很大。
(3)工位判斷
每 排模板上應(yīng)該夾住10個(gè)瓶子進(jìn)行灌裝����、加蓋����、整蓋��、擰蓋、判斷缺蓋等工序,但由于各種客觀情況(風(fēng)道等問題)���,并不能保證每次都夾滿10個(gè)瓶子��。當(dāng)少于 10個(gè)瓶子的時(shí)候�����,整排都不能進(jìn)行任何操作,否則設(shè)備會(huì)產(chǎn)生嚴(yán)重故障(比如無瓶加蓋會(huì)卡住模板)����。解決這個(gè)問題的辦法是�,采用位移指令進(jìn)行工位判斷���,具體 程序如圖11所示���。
圖11 工位判斷程序
(4)回零停止
當(dāng) 按下停止按鈕后�,各軸的最終停止位置必須是自己的“原點(diǎn)”,這樣�,在下一次啟動(dòng)時(shí)��,就不需要重新全體尋原點(diǎn)了(全體回零時(shí)間較長)�。另外一方面��,如果各軸 都在原點(diǎn)的話�,絕對不會(huì)出現(xiàn)“撞車”的現(xiàn)象�,否則如果其中一根軸不在原點(diǎn)就停止動(dòng)作����,其它的軸在回零過程中很容易撞上它?;亓阃V沟姆椒ú捎?Cam_Out指令���,程序如圖12所示��。
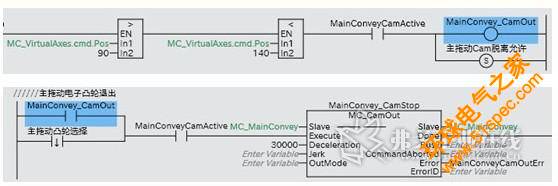
圖12 回零停止程序
如圖12程序所示,當(dāng)需要停止主拖動(dòng)軸時(shí)���,必須要等待主拖動(dòng)當(dāng)前動(dòng)作完成后�����。根據(jù)虛軸的位置判斷�,當(dāng)虛軸處于90到140之間時(shí)��,主拖動(dòng)處于停止?fàn)顟B(tài),這時(shí)執(zhí)行MC_CamOut指令,就可以將這個(gè)從軸順利脫出凸輪表。
在 啟動(dòng)和停止過程中�,必須特別注意一個(gè)問題��,那就是回零停止和啟動(dòng)過程一樣����,必須要按照嚴(yán)格的順序來執(zhí)行��。例如�,停止時(shí)���,“出瓶”早于“主拖動(dòng)”,“主拖 動(dòng)”早于“進(jìn)瓶”,而進(jìn)瓶時(shí)剛好相反。這樣才能保證在下次啟動(dòng)時(shí)���,出瓶工位的瓶子剛好被抓出,而進(jìn)瓶工位則是空的��,剛好可以開始放瓶����。如果不按照順序啟 動(dòng)�,則會(huì)使進(jìn)瓶工位“有瓶”狀態(tài)下打開模板���,導(dǎo)致瓶子掉落;或者出瓶工位“有瓶”��,但不抓瓶����,導(dǎo)致瓶子轉(zhuǎn)到機(jī)器底下����。這些都是不允許的��。
(5)急停保護(hù)
對于“撞車”的保護(hù),是整個(gè)系統(tǒng)設(shè)計(jì)中非常重要的一部分。如果所有軸都能夠嚴(yán)格按照自己凸輪曲線進(jìn)行運(yùn)動(dòng)�,并且沒有掛進(jìn)凸輪的軸也能夠正常動(dòng)作的話�,“撞車”原則上是不會(huì)發(fā)生的����。但由于伺服故障�����、氣缸故障等諸多因素的產(chǎn)生���,會(huì)使得“撞車”發(fā)生的概率增加�。
“撞 車”的情況可以分為兩大類����,一類是“凸輪動(dòng)作”內(nèi)部碰撞,另一類是凸輪動(dòng)作與非凸輪動(dòng)作之間的碰撞���。例如:進(jìn)瓶抓瓶機(jī)構(gòu)與進(jìn)瓶皮帶之間����,由于進(jìn)瓶抓瓶的原 點(diǎn)位于進(jìn)瓶皮帶上方,下移放瓶時(shí)需要水平和垂直兩根軸同時(shí)動(dòng)作,才能繞過皮帶。如果此時(shí)進(jìn)瓶水平軸由于種種原因沒有動(dòng)作,只有垂直軸在動(dòng)作,氣爪將直接砸 在皮帶上���,造成設(shè)備嚴(yán)重的損壞�����。這屬于凸輪動(dòng)作內(nèi)部撞車。再例如:當(dāng)擰蓋機(jī)構(gòu)進(jìn)行擰蓋時(shí)���,擰蓋爪抓在瓶子上���,如果此時(shí)拖板提前開始動(dòng)作�,則會(huì)將瓶子拉壞��, 甚至將模板掀翻。這屬于凸輪軸與非凸輪軸之間的碰撞��。為避免這些問題的產(chǎn)生���,編寫了一系列程序��,部分程序如圖13所示����。
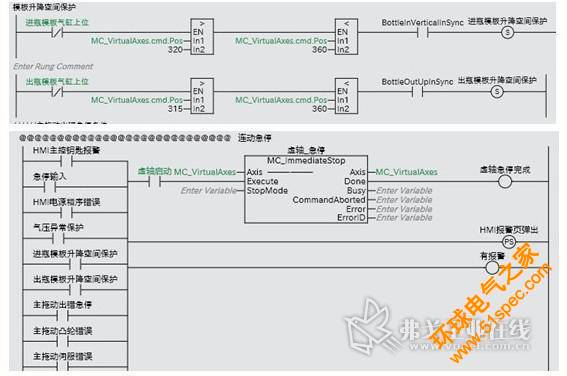
圖13 進(jìn)、出瓶模板的空間保護(hù)程序
圖 13所示兩段程序是對進(jìn)、出瓶模板的空間保護(hù)����,當(dāng)模板被氣缸頂起時(shí)���,模板絕對不能拖動(dòng)�,否則會(huì)被掀翻。這里依舊采取通過對主軸位置的判斷,來判斷從軸����。當(dāng) 主軸位置處于320和360之間時(shí)�,模板被氣缸頂起��,同時(shí)由模板開合軸將模板分開�。如果此時(shí)氣缸突然下降��,模板將來不及合攏���,而被掀翻。此時(shí)可通過 MC_ImmediateStop指令完成急停操作�。
(6)曲柄的線性處理
整套設(shè)備采用了多個(gè)曲柄機(jī)構(gòu)�,比如灌裝����、擰蓋升降 等等。根據(jù)曲柄機(jī)構(gòu)的特性�,當(dāng)伺服勻速旋轉(zhuǎn)時(shí)�����,曲柄機(jī)構(gòu)的垂直速度并不是勻速的,并且垂直位置也不是線性變化的��。而灌裝機(jī)構(gòu)需要一個(gè)相對穩(wěn)定的速度(主要 是防止液體飛濺)���,和一個(gè)線性的標(biāo)定(可以通過對伺服位置的設(shè)定����,直接標(biāo)定灌裝量)���。解決速度基本恒定的方式如下:
IF 30>=MC_Fill1.Act.Pos OR (180>=MC_Fill1.Act.Pos AND MC_Fill1.Act.Pos>150) THEN
Fill1_Velocity_Out:=LREAL#1*灌裝1速度HMI;
ELSIF (60>=MC_Fill1.Act.Pos AND MC_Fill1.Act.Pos>30) OR (150>=MC_Fill1.Act.Pos AND MC_Fill1.Act.Pos>120) THEN
Fill1_Velocity_Out:=LREAL#0.8*灌裝1速度HMI;
ELSIF (80>=MC_Fill1.Act.Pos AND MC_Fill1.Act.Pos>60) OR (120>=MC_Fill1.Act.Pos AND MC_Fill1.Act.Pos>100) THEN
Fill1_Velocity_Out:=LREAL#0.5*灌裝1速度HMI;
ELSIF 100>=MC_Fill1.Act.Pos AND MC_Fill1.Act.Pos>80 THEN
Fill1_Velocity_Out:=LREAL#0.3*灌裝1速度HMI;
END_IF;
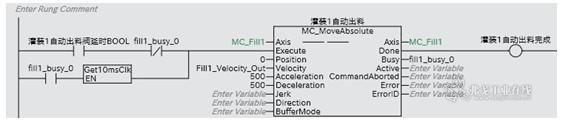
用以上公式�,可以在灌裝伺服到達(dá)各個(gè)位置時(shí)����,給予不同的速度,通過對角速度賦予“多段速”來實(shí)現(xiàn)垂直速度的基本恒定�����。再通過每10ms寫入一次速度的方式��,來實(shí)現(xiàn)速度的變換����。解決位置可標(biāo)定的方法如下:
糾偏角度轉(zhuǎn)弧度:=DegToRad(REAL#15);
Fill1_Feed_rad:=ACOS(臨時(shí)數(shù)字1);
Fill1_Feed:=RadToDeg(Fill1_Feed_rad)-REAL#15;
臨時(shí)數(shù)字:=REAL#3.14*REAL#16*REAL#7.5;
臨時(shí)數(shù)字1:=COS(糾偏角度轉(zhuǎn)弧度)-HMI氣缸1進(jìn)給量/臨時(shí)數(shù)字;
通過平面解析幾何和三角函數(shù)運(yùn)算����,求得伺服角位置和曲柄垂直位置之間的線性關(guān)系����。
最終實(shí)現(xiàn),觸摸屏上面可以直接設(shè)定以“毫升”為單位的灌裝量值����。
(7)凸輪表的變換
凸 輪表編制好以后�,每根軸都會(huì)按照自己的凸輪表數(shù)據(jù)進(jìn)行重復(fù)運(yùn)動(dòng)���。但是��,如果更換了產(chǎn)品(主要是瓶子大小有變化)��,個(gè)別軸的動(dòng)作就要發(fā)生變化。例如:把 220mm高的瓶子換成了300mm���,那么出瓶放瓶時(shí),氣爪距離傳送帶的高度就要增加��,這就要求凸輪表可以通過程序進(jìn)行變換����,程序如下:
FOR IndexOutUp := UINT#10#0 TO UINT#10#360 DO
IF IndexOutUp<=UINT#10#70 THEN
Cam_BottleOutUp[IndexOutUp].Distance:= Cam_BottleOutUp00[IndexOutUp].Distance*2*BottleOutUpFeed1;
ELSIF IndexOutUp>UINT#10#70 and IndexOutUp<=UINT#10#85 THEN
Cam_BottleOutUp[IndexOutUp].Distance:= (Cam_BottleOutUp00[IndexOutUp].Distance-0.5)*2*(BottleOutUpFeed2 - BottleOutUpFeed1)+BottleOutUpFeed1;
ELSE
Cam_BottleOutUp[IndexOutUp].Distance:= Cam_BottleOutUp00[IndexOutUp].Distance * BottleOutUpFeed2;
END_IF;
END_FOR;
在 上述程序中,Cam_BottleOutUp00[IndexOutUp].Distance是出瓶頂升凸輪表的點(diǎn)���,IndexOutUp是FOR循環(huán)語 句的循環(huán)變量,通過FOR循環(huán)語句���,將凸輪表內(nèi)的若干個(gè)點(diǎn)依次更改,再通過如下指令進(jìn)行保存��,這樣����,這根從軸就會(huì)按照新的凸輪表來進(jìn)行運(yùn)動(dòng)了�。
4結(jié)束語
通過系統(tǒng)現(xiàn)場調(diào)試及客戶的試生產(chǎn),所有控制要求的解決方案都得以驗(yàn)證,滿足客戶的改造需求����,并且效果良好�����。


