發布日期:2022-08-21 點擊率:104
摘 要:交通流量采集傳感器在交通控制中起著極其重要的作用,它是交通控制系統中控制參數采集的主要工具,它為干線協調控制提供基礎數據,是決定交通信號控制精度的主要部件。本文通過對干線交通的研究,研究了干線交通中交通流量采集傳感器布局。首先,討論了干線中測速對傳感器在車道上布局的影響。其次,考慮傳感器的采集可靠性,給出了干線不同車道上車流量之間的相似度估算公式,討論車道上傳感器利用率的情況。最后給出了干線交通流量采集傳感器的優化布局的整體思路。
0 前言
交通問題現在已經成為世界很多城市所面對的問題,很多研究者都投身到交通工程研究中,以尋求更好的交通方案來解決現在所面對的交通擁堵、交通事故頻發的問題。
同時,隨著現代交通以及電子技術的發展,交通控制也得到了迅速地發展,已經由先前的手動控制系統轉變為全自動的控制系統。此時為了提高交通控制的精度,以及對交通控制信號的很好配時和提高整個交通系統的運行效率,交通流量的采集就起著至關重要的作用。
對于交通流量的采集,早期人們是通過人工統計的方式進行的,通過對一時間段中經過路口的車輛數的統計,分析出交叉口車流量的大致規律,但是此種方式既耗費人力,又效率極低。于是人們就考慮了利用傳感器來采集交通流量,如CCD攝像的采集、GPS探測器的采集、地感線圈的采集等等。這些傳感器的采集提高了采集流量也提高了控制系統的精度,假如傳感器布局合理,可以在提高整個交通控制系統性能的同時減少費用,從而提高交通控制的性能。在本文中是以地感線圈來研究傳感器布局的。
1 干線中速度檢測對傳感器的布局影響
在干線交通中,交通流量采集傳感器的布局合理與否決定著干線協調控制的實現。在干線中,為了對干線交通的信號配時,需要對干線的車流量q的采集,以及對車輛速度的檢測。
由于在干線交通控制中,為了測量車輛的速度,要在車道的上游和下游都要考慮布置傳感器。在此設干線兩交叉口之間距離是L,車輛在直行的方向從啟動到加速到勻速行駛一般會需要一段時間t的,同時,當車輛遇見紅燈的時候也要減速行駛,也需要一段時間t,那么可知道要車輛出車子的行駛速度,在干線直行方向傳感器的布置離交叉口必須要有一段距離S,可以通過經驗統計值給出車輛的行駛速度v,同時設交叉口的寬度為d,那么可以得到加減速的路段距離S1為:
則有式(1)可知,要使傳感器布置在干道的L-S1之內才能很好測量車輛的速度,同時布置在上游L-S1+d+s以內的干道中,如圖1所示,在文獻[1]中,一般情況下設置兩個傳感器之間的距離為5m左右,同時要使S>S1。
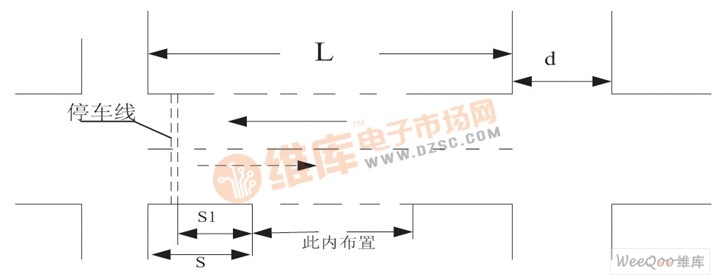
圖1 傳感器布置的范圍。
2 干線中傳感器的可靠性處理
由于車流量較大,當布置傳感器時就要考慮傳感器的可靠性,如一個車道的傳感器損壞時,對此車道的車流量就無法采集。而此時我們就可以通過先前對每個車道的車流量采集數據進行分析,得到每個車道上的傳感器的利用率和車道上車流量之間的相似度,進而可以通過利用率和相似度來進行傳感器之間的融合處理。
依據文獻[5]中對路段上車輛的轉向比研究結果分析,可知干線路段上的車流量,在一定時間中是有一定的轉向比的,在此假定左轉、直行、右轉的轉向比為n1:n2:n3,一般情況下n2會大于n1和n3,此時,交通干線上此三個方向上的車流量相對來說就有一定的比例關系。由此可以知道三個方向的車道上傳感器利用率就有很大不同。
2.1 車道中傳感器的利用率
在主干線上,根據實際經驗及文獻[5]中對實際交通流量采集得到的數據,并對轉向比的分析,可知每個車道上的傳感器使用次數相對于車道而言可以看作是一個分段函數,可以表示為如圖2所示的情況。圖中的縱坐標 表示傳感器在此車道上的平均使用次數,以此表示傳感器的利用率。橫坐標L表示車道分布,在O到L1是處在隔離帶與左轉車道之間,此距離一般很小,L1到L2之間是車輛左轉的車道,L2到L3之間是車輛直行的車道,L3到L4之間表示車輛右轉的車道。
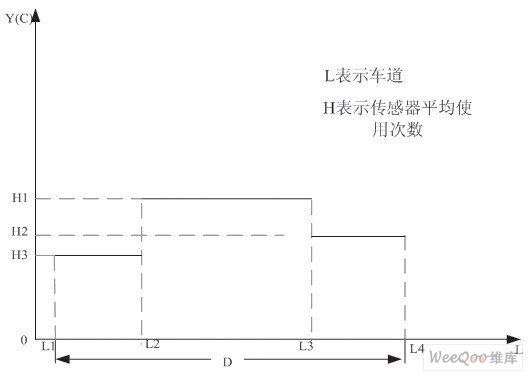
圖2 傳感器在干道的利用率
本文考慮一個左轉車道,兩個直行車道,一個右轉車道,由圖可知:
(1)在O到L1之間靠近隔離帶處,車輛一般很少經過,此處的傳感器利用率Y近似為零。
(2)在L1和L2之間為一個左轉的車道,相對于直行的車流量來說,左轉的車流量不是很大,傳感器的利用率也不是很高。
(3)對于行車的干線中央處也就是直行的兩個車道L2到L3之間,由于車流量較大,傳感器的平均利用率最高。
(4)L3和L4之間是一個右轉的車道,因為在此交叉口處不管是遇見紅燈還是綠燈,一般情況下此車道都是允許車輛通行的,相對而言此車道的車流量就比左轉車流量大而小于直行道的車流量。在這種情況下,傳感器的平均利用率就如圖所示,比直行的低而比左轉的要高。
由以上的討論分析,可知干線車道與傳感器利用率之間的關系,可以近似地用式(2)表示:
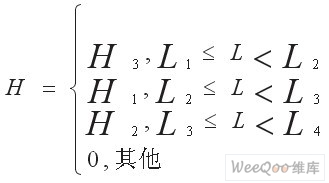
綜合以上的討論,并由式(2)可知,干線中在左轉、直行和右轉車道的交通流量采集傳感器利用率是很大不同的,其中直行的車道上較大。因此直行方向上傳感器損壞的可能性也相對較大,為保證傳感器準確地采集車流量,就要對車道上車流量的相似度進行討論。
2.2 車道之間交通流量的相似度
由2.1節的討論,可知不同車道上傳感器的利用率是有很大不同的,那么為了保證干線上車流量采集沒有誤差,在其中一車道上傳感器損壞的情況下我們考慮是不是可以通過相鄰的傳感器得到的數據來近似地給出此車道上交通參數呢?此時我們就需要考慮車道之間的車流量的相似度。
對于本文中所討論的干線車道,可表示如圖3所示,圖中,1表示左轉的車道,2和3表示直行的車道,4表示右轉的車道。為了得到車道之間的車流量的相似度,我們首先要對車流量進行檢測,在此假設沒有布置地感線圈之前,我們可先利用CCD攝像來采集交通流量。
圖3 車道的描述對于干線,每天的交通流量一般情況下是保持在一定的范圍,即可以表示為 ,于是我們可以采集一天的交通流量數據來進行估算。
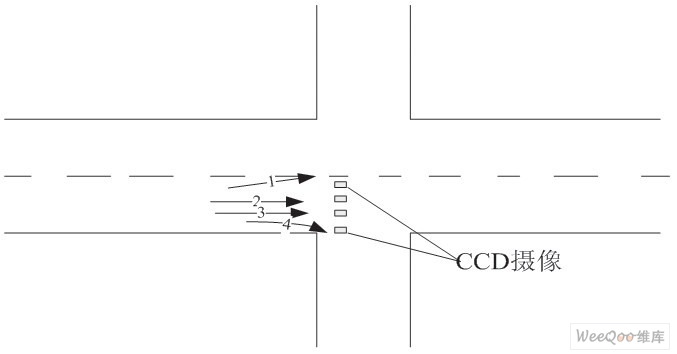
圖3 車道的描述
由圖1規定的車道,此時首先通過CCD攝像可以分別測出其在每一時間段中的三個車道的車流量。在此假設采集到車道1的車流量為Xi,車道2的車流量Yi,車道3的車流量為Zi,車道4的車流量為Wi其中i=1,2,…,n,n為所取的時間段數。那么可以分別求出這四個車道的車流量相似度為:ρ12、ρ13、ρ14、ρ23、ρ24、ρ34,此個相似度可表示為如下:

其中 分別為三個車道的每個時間段的車流量的總和,E(X)、E(Y)、E(Z)、E(W)分別為X、Y、Z、W的數學期望,代表車道上車流量的平均值。E(XY)、E(XZ)、E(XW)、E(YZ)、E(YW)、E(ZW)分別為車流量兩兩乘積的期望,σX、σY、σZ、σW分別為四個車道上車流量的標準差,由此可以得到在不同車道上的車流量之間的相似度程度,為傳感器可靠性分析和傳感器融合提供前提。
分別為三個車道的每個時間段的車流量的總和,E(X)、E(Y)、E(Z)、E(W)分別為X、Y、Z、W的數學期望,代表車道上車流量的平均值。E(XY)、E(XZ)、E(XW)、E(YZ)、E(YW)、E(ZW)分別為車流量兩兩乘積的期望,σX、σY、σZ、σW分別為四個車道上車流量的標準差,由此可以得到在不同車道上的車流量之間的相似度程度,為傳感器可靠性分析和傳感器融合提供前提。
2.3 干線傳感器可靠性與布局的分析
由于干線上不同車道的傳感器的利用率是不同的,那么在布局傳感器時就要考慮當有傳感器的損壞時,怎么對其進行處理。此時就要考慮布局傳感器時,在利用率較高的車道上加強傳感器可靠性處理技術,以提高檢測的準確性。于是2.2節分析了通過CCD攝像得到車道上的交通流量的相似度,當其中車道上利用率高的傳感器損壞時,可能傳感器得到的數據是錯誤的。那么我們就可以通過車道車流量相似度,利用其他的車道上傳感器采集的車流量來近似得出此車道上的車流量,即此車道上的車流量可表示為:
其中i、j分別代表前文討論的車道號(9)由式(9)可知,此車道上的車流量是可以通過相似度表示為其余車道上的函數。這樣,我們可以在布局傳感器時多考慮直行道上的傳感器的融合性處理,為保證整個布局傳感器采集的可靠性,來降低誤差,提高精度,可表示為如圖4所示。
圖4 傳感器可靠性分析經過這種處理,可以近似推算出有傳感器損壞的車道上交通車流量q1,同時對于車道上的其他一些參數的估計也可以近似地用此估計出來,確保了干線上傳感器采集的可靠性。
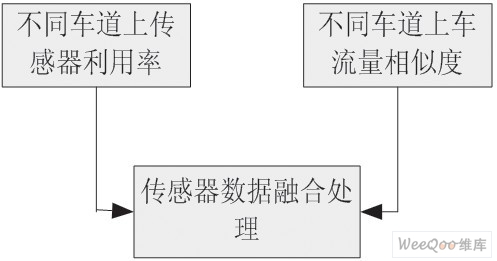
圖4 傳感器可靠性分析
3 交通流量采集傳感器布局的總結
綜合以上的討論,分析傳感器優化布局的整體思路可以描述為如圖5所示,以此得到傳感器的布局的合理性。
并且在保證流量采集精確的情況下,最大限度地降低傳感器布局的消耗。
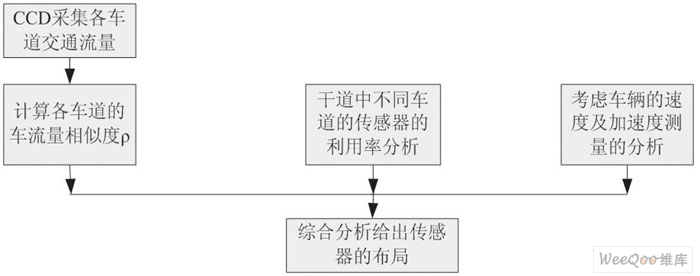
圖5 傳感器優化布局的整體思路。
4 結束語
本文依據現代交通的發展需求,以及交通控制的發展與改進,給出了干線交通中交通流量采集傳感器優化布局的一些影響因素。首先在干線交通中,車道上的車速也是一個控制參數,為此要考慮合理布局傳感器來測量車速度和加速度。然后考慮了提高傳感器的可靠性,分析各車道車流量之間的相似度和傳感器利用率,當流量采集傳感器損壞時利用臨近車道的傳感器估計出此車道的車流量以及一些信號參數;最后由這些因素給出了傳感器的合理布局整體思路。文章中對有些考慮因素的討論可能還不是很全面合理,如傳感器采集之間產生沖突交叉等會影響測量的準確性,這些都可歸結對傳感器融合處理的研究,同時對每種情況還需要具體做進一步研究驗證,這些都還有待以后研究工作的深入。
參考文獻:
[1] Klein L A.SeNSor technologies and data requirements forITS [M].Arrech House Boston & London,2001.
[2] Washington D.C.Transportation Research Board.[C].76thAnnual Meeting.1997.
[3] Ahmed S A,Hussain T M,Saadawi T N.Active and passiveinfrared sensors for vehicular traffic control[C]//IEEE44th Vehicular Technology Conference,New York,1994:1393-1397.
[4] Linauer M,Mrakotsky E.Method to generate floating cardata for use in traffic telematics systems[C].Nagoya:11thWorld Congress on ITS.2004.
[5] 尹宏賓,徐建閩.道路交通控制技術[M].廣州:華南理工大學出版社.
[6] 張 航,田冬軍,曾憲寶,等.城市道路交通檢測器優化配置方法研究[J].武漢理工大學學報,2008,32(6):1161-1164.
[7] 王樹欣,伍湘彬.地感線圈在交通控制領域中的應用[J].電子世界,2005(8):48.
[8] 伍建國,王 峰.城市道路交通數據采集系統檢測器優化布點研究[J].公路交通科技,2004(2):90-93,100.
[9] 韋達利,陳 鋒,卞 凱,等.基于數據融合的交通流量數據在線校正[J].中南大學學報(自然科學版),2009,40(S1):344-349.
[10] 姜桂艷.道路交通狀態判別技術與應用[M].北京:人民交通出版社,2004.
下一篇: PLC、DCS、FCS三大控
上一篇: 基于無線傳感器網絡節

型號:ML200PS1PC
價格:面議
庫存:10
訂貨號:ML200PS1PC

型號:ABH200PSC1B
價格:面議
庫存:10
訂貨號:ABH200PSC1B

型號:GLGD12D
價格:面議
庫存:10
訂貨號:GLGD12D

型號:19C003PG1K
價格:¥8000
庫存:10
訂貨號:19C003PG1K

型號:13C0500PA1K
價格:¥5500
庫存:10
訂貨號:13C0500PA1K

型號:SPT4V5000PS5W10
價格:¥7500
庫存:10
訂貨號:SPT4V5000PS5W10


