發布日期:2022-10-09 點擊率:86
光柵作為精密測量的一種工具,由于他本身具有的優點,已在精密儀器、坐標測量、精確定位、高精度精密加工等領域得到了廣泛的應用[1,2]。光柵測量技術是以光柵相對移動所形成的莫爾條紋信號為基礎的,對此信號進行一系列的處理,即可獲得光柵相對移動的位移量[3]。將光柵位移傳感器與微電子技術相結合,進行線性位移量的測量,以實現較高的測量精度。本文采用光柵作為傳感元件,經接收元件后變為周期性變化的電信號(近似正弦信號),采用邏輯辨向電路區別位移的正反向,利用單片機進行數據處理并顯示結果。軟件采用匯編語言實現。
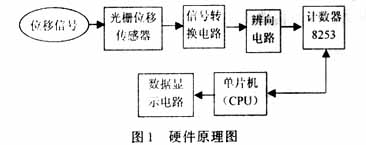
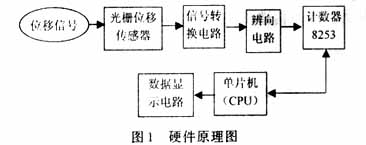
1 硬件電路
本設計的硬件電路主要由單片機89C51、計數器8253、細分與辨向電路、信號變換電路和光柵位移傳感器組成。如圖1所示。
1.1 光柵位移傳感器
光柵位移傳感器包括以下幾部分:光柵;光柵光學組成。光柵光學系統的作用是形成莫爾條紋;光電接受系統。光電接受系統是由光敏元件組成,他將莫爾條紋的光學信號轉換成電信號,本系統采用的光敏元件是4個硅光電池。
1.2 信號
變換電路
信號變換就是將由光敏元件輸出的正弦電信號轉換成方波信號。本文中采用的比較器LM339,來自光柵的莫爾條紋照到光敏元件硅光電池上,他們所輸出的電信號加到LM339的2個比較器的正輸入端上,而在這2個比較器的負輸入端分別預制一定的參考電壓,該參考電壓應使光柵輸出的方波的高、低電平寬度一樣。
1.3 細分與辨向電路
1.3.1 細分電路
為記錄光柵上移過的條紋數目和判斷光柵的移動率等,傳感器中采用4極硅光電池來接收莫爾條紋信號。調整莫爾條紋的寬度B,使他正好與4個硅光電池的寬度相同。則可直接獲得在相位上依次相差90°的4路信號,即進行4倍細分。如圖2所示。

細分電路
1.3.2 辨向電路
位移除了有大小的屬性外,還具有方向的屬性。為了辨別標尺光柵位移的方向,僅靠一個光敏元件輸出一個信號是不行的。必須有2個以上的信號根據他們的相位不同來判斷位移方向。因此,本設計采用的是4個硅光電池來接收莫爾條紋信號,則輸出的4路信號在相位上依次相差90°,利用這種特點設計的辨向電路的如圖3所示。圖中u1,u2和u3,u4分別通過相同的電路實現對位移方向的區別。當莫爾條紋上移時(假設經過硅光電池的前2個,此時u1,u2有信號,u3,u4無信號),則圖中A點有計數脈沖,B點為恒定電平;當莫爾條紋下移時(假設經過硅光電池的前2個,此時u1,u2有信號,u3,u4無信號),則圖中B點有計數脈沖,A點為恒定電平。用2個不同計數器分別記錄上移和下移所形成的脈沖數,即可實現辨向。
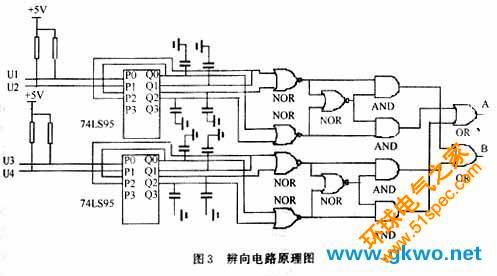
辨向電路
1.4 LED顯示
本文采用動態4位顯示。第1位為符號為,莫爾條紋上移為正,下移為負;第2,3位為整數位;第4位為小數位。將所有的段選線并聯在一起,由單片機的P1口控制,而共陰極公共端分別由P3.0,P3.1,P3.2,P3.3控制,實現各位分時選通。
2 軟件部分
軟件部分主要有采集子程序、數據處理和顯示子程序組成[4]。
采集子程序完成對計數值的讀入和轉化;數據處理子程序完成對采集數據的線形化處理;顯示子程序對結果進行循環顯示。程序的流程如圖4所示。
程序的流程
3 結 語
本文中,設計的硬件采用比較器LM339把光敏器件輸出信號轉換成方波信號,采用邏輯辨向電路,對光柵的正向、反向移動做準確的判斷;采用8253的2個計數器分別對正反兩路信號進行計數,然后,用89C51進行數據處理,送到顯示器顯示。硬件結構簡單、成本低、工作可靠、精度比較高;軟件采用匯編語言實現,程序簡單、可讀性強、效率高。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


